
„Methodenforschung
zur Entwicklung fahrzeugakustischen Eigenschaften”
GRUNDLAGEN DER FAHRZEUGAKUSTIK
Zusammengestellt
von
Dr.-Ing.
habil. György WERSÉNYI
Széchenyi István Universität, Győr
im Auftrag
vom
Lehrstuhl für
Gesamtfahrzeugentwicklung
Stand:
2014.08.27
INHALT
1. Physikalische Beschreibung des Schalls
1.1 Physikalische Beschreibung
1.2 Die harmonische Schwingung
1.6 Schalldruck und Schallintensität
2. Schallausbreitung in verschiedenen Umgebungen
2.2 Freies und diffuses Schallfeld
2.3 Wellenausbreitung mit Hindernissen
2.5 Berechnung der Nachhallzeit
3. Das Gehör und die Wahrnehmung von Vibrationen
4. Mechanische und akustische Elemente
4.2 Modelle mit konzentrierten
Systemparametern
6. Methoden der Analyse und Messtechnik
6.1 Grundlagen zur Messtechnik
7.1 Kundenerwartungen und Entwicklung
7.2 Vibroakustische Fahrzeugeigenschaften
7.6 Fahrbahnerregte Schwingungen
7.9 Karosserieschwingungen
(Strukturdynamik)
8. Geräusche und Geräuschminderung im Fahrzeug
8.4 Stör- und Betätigungsgeräusch
8.7 ANC - Active Noise Control /
Cancellation
9. Grundlagen numerischer Methoden
Schwingung mit Dämpfung (ohne Anregung)
Schwingung mit Dämpfung (mit Anregung)
10.2 FEM (Finite Element Method)
10.3 BEM (Boundary Element Method)
10.4 MKS
(Mehrkörpersimulation)
10.5 SEA -
Statistische Energieanalyse
10.6 PML -
Perfectly Matched Layer
10.7 CFD - Computational Fluid Dynamics
10.8 TMM -
Transfer-Matrix Method
10.11 Lineare und nicht lineare Analyse
***********************************************************************************************************
1. Physikalische Beschreibung des Schalls
1.1
Physikalische Beschreibung
Eine Schwingung mit konstanter
Amplitude heißt ungedämpft. Nimmt die Amplitude mit der Zeit ab, so handelt es
sich um eine gedämpfte Schwingung. Schallwellen sind mechanische Wellen, zu
deren Fortpflanzung ein Medium benötigt wird. Hier pflanzt sich der
Bewegungszustand fort und nicht das Material selbst ("Energietransport
ohne Stofftransport").
Abbildung.
Darstellung von einer mechanischen und elektromagnetischen Welle.
[http://ffden-2.phys.uaf.edu/631fall2008_web.dir/wallace_webpage/4_Elec.html]
Eine Schwingung mit konstanter
Amplitude heißt ungedämpft. Nimmt die Amplitude mit der Zeit ab, so handelt es
sich um eine gedämpfte Schwingung. Schallwellen sind mechanische Wellen, zu deren
Fortpflanzung ein Medium benötigt wird. Hier pflanzt sich der Bewegungszustand
fort und nicht das Material selbst ("Energietransport ohne
Stofftransport").
Abbildung. Darstellung
der Wellenausbreitung.
[http://www.acs.psu.edu/drussell/demos.html]
1.2 Die
harmonische Schwingung
Jeder Schall kann in
Zusammensetzung von Sinus-Grundschwingungen aufgeteilt werden (Fourier). Der
wichtigste Schwingungstyp ist die harmonische Schwingung (Sinusschwingung):
y(t) = Asin(ωt+φ)
wobei y(t) bezeichnet den Momentanwert der Auslenkung, A ist Amplitude, ω ist
die Kreisfrequenz in [rad/sec] und ω = 2πf.
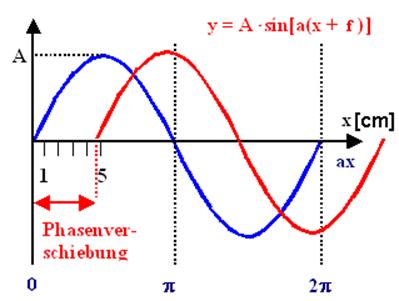
Abbildung.
Phasenverschiebung.
[http://www.tf.uni-kiel.de/matwis/amat/mw2_ge/kap_3/basics/t3_4_1.html]
Die folgende Abbildung zeigt die
komplexe Beschreibung von Sinuswellen.
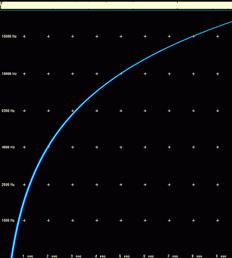
Abbildung.
Darstellung eines "sweep sinus"
Tons. Es besteht aus reiner Sinuswellen von 20 Hz bis 20 kHz. Sie werden nach
einander innerhalb von 10 Sekunden abgespielt. Klicken Sie auf das Bild für die
Wiedergabe.
[http://www.tf.uni-kiel.de/matwis/amat/mw2_ge/kap_3/basics/t3_4_1.html]
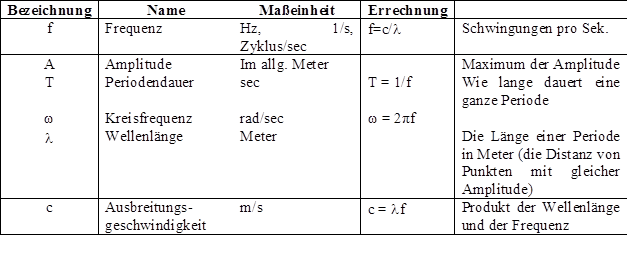
1.3
Grundeinheiten
Die folgende Tabelle zeigt die
wichtigsten Grundeinheiten und deren Zusammenhang.
1.4
Pendelgleichung
Eine homogene, lineare
Differentialgleichung 2. Ordnung mit konstanten Koeffizienten:
x'' + kx
= 0
ist in der Physik als Pendelgleichung
bekannt. Bei ungedämpfter Schwingung:

Die Gleichung kann wie folgend
abgeleitet werden:
F = F feder+Fbrems+Fextern
= ma
a(t) = d2x(t)/dt2
Ffeder = -Dx(t)
Fbrems = Freib
= -konst*v(t)
Fextern = z.B. Schwerkraft.
F = ma = -Dx
Die Lösung dieser
Differentialgleichung ist: x(t) = C1sin(ωt)+C2cos(ωt)
Frequenz der Bewegung ist: f=1/T,
wobei
|
|

Bei gedämpfter Schwingung
sieht die Gleichung wie folgend aus:
|
|
Wobei Dämpfungsfaktor und Wellenzahl
sind:
|
|
|||
|
|
|||


und die Eigenfrequenz ist: ω
= D/m = 2πf. Die Schwingung wird exponentiell gedämpft:
|
|
Die Lösung dieser
Differentialgleichung - wenn Bremskraft klein - ist:
|
|

Abbildung.
Lösung bei gedämpfter Schwingung.
Wenn Bremskraft groß ist, kann
keine periodische Schwingung bilden. Schauen Sie sich das folgende Video an. http://www.youtube.com/watch?v=eyO1UlrPqIQ
Der Zusammenhang zwischen
Wellenlänge und Frequenz ist:
Abbildung.
Wellen mit verschiedener Amplitude.
[http://ralphmuehleisen.com/animations.html]
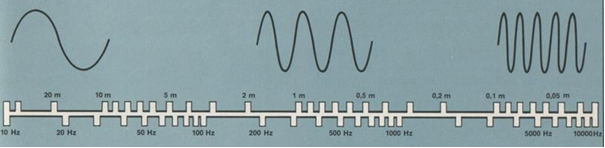
Abbildung.
Zusammenhang zwischen Wellenlänge und Frequenz in der Luft.
[http://www.bksv.com/]
Abbildung.
Ausbreitung eines Impulses.
[http://www.acs.psu.edu/drussell/demos.html]
Abbildung.
Bewegung bei einer transversalen Welle.
[http://www.acs.psu.edu/drussell/demos.html]
1.5
Schallgeschwindigkeit
Schallgeschwindigkeit in der Luft
beträgt 328-344 m/s. Bei +1 Celsius wird es um +0,6 m/s grösser. Die
Schallgeschwindigkeit ist in - akustisch gesehen - dichteren Materialien wie
Flüssigkeiten und festen Körpern größer. Die Ursache ist die stärkere Bindung
unter den Teilchen, so ist die Energieübergabe zwischen den Molekülen
schneller. z.B. die Schallgeschwindigkeit im Wasser beträgt 1400 m/s, im Stahl
ca. 5000 m/s. Selbe Frequenz und ein anderes Medium bedeutet andere
Wellenlänge! Ein Kundtsches Rohr kann die
Wellenausbreitung anzeigen und sogar ist es möglich mit ihm die
Schallgeschwindigkeit zu messen: http://www.youtube.com/watch?v=N8q4xAL2WpU
1.6
Schalldruck und Schallintensität
Der wichtigste Parameter von
Schallwellen, der durch die Ohren und auch durch Mikrofone wahrgenommen wird,
ist der Schalldruck. Es ist der sich zeitlich ändernde Anteil des Luftdrucks in
N/m2, d.h. Pascal. Da Druck mit keiner Richtungsangabe verknüpft
werden kann, handelt es sich um eine skalare Größe. (f ist die Kraft, A ist die
Fläche, worauf die Kraft wirkt): p=f/A [Pa].
Schalldruck ist ein Parameter des Schallfeldes und nicht der Schallquelle.
Der andere wichtige Parameter von
Schallwellen ist die Intensität. Es beschreibt den Energiefluss, d.h. die
Energie, die pro Zeiteinheit (Sekunde) eine senkrecht zur Abstrahlrichtung
stehende Einheitsfläche passiert. Es ist die Energie, die eine 1 m2 Fläche in 1
s passiert. Mit dem Schalldruck p und der Teilchengeschwindigkeit v ist:
i = pv
[W/m2].
Schallintensität ist eine
vektorielle Größe mit Richtung. Die Größen Schalldruck und Schallintensität
werden in der Regel als Pegel (in dB=Dezibel) angegeben. Unter dem Begriff
"Pegel" wird das logarithmierte Verhältnis von gemessenem Wert zu
einem genormten Bezugswert verstanden.
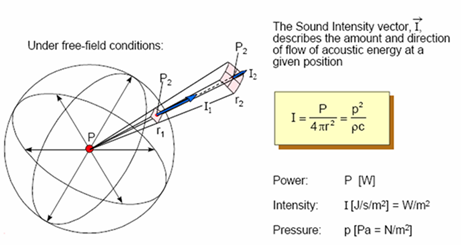
Abbildung.
Interpretation von Schalldruck und Schallintensität.
[http://www.bksv.com/]
1.7
Pegelrechnung
Die Benutzung des Logarithmus ist
in der Akustik selbstverständlich, denn
- die
Wahrnehmung, das Gehör arbeitet logarithmisch: das sogenannte subjektive
Lautheit ist mit dem Logarithmus von den Grundeinheiten proportional,
- die
Grenzen von Minimal- und Maximalwerten sind sehr groß sowohl in der
Frequenz als auch in der Amplitude (Gehör: 1:1000 bzw. 1:1M in der
Frequenz und Amplitude)
- die
Berechnungen mit Addieren und Subtraktion ist einfacher, als mit
Multiplikation und Teilen (z.B. bei Verstärkern).
Der Intensitätspegel ist:
I = 10 log( I/I0
) [dB]
wobei I0 = 10-12
W/m2.
Der Schalldruckpegel ist:
P = 10 log (P2/p02)
= 20 log( P/p0) [dB]
wobei p0= 20 µPa.
Aufgabe: Bestimmen Sie wie viel
dB ist 2 Pa Schalldruck:
P = 20 log ( 2
Pa/20 µPa ) = 20 log(
2/20x10-6) = 20 log (105) = 20x5 = 100 dB.
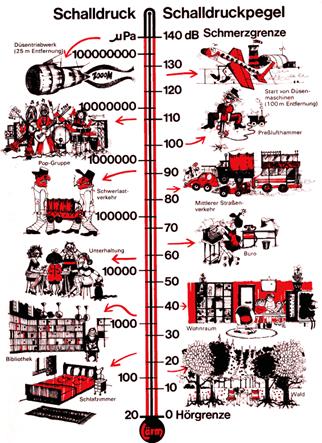
Abbildung.
Darstellung von Schallquellen und Pegelwerten.
[http://www.bksv.com/]
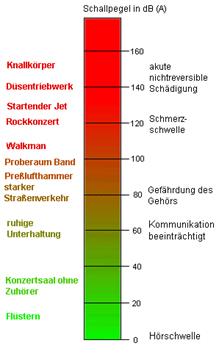
Abbildung.
Darstellung von Pegelwerten in dB(A).
[http://www.dasp.uni-wuppertal.de/ars_auditus/akustik/akustik5.htm]
Im "freien Schallfeld"
sinkt der Schalldruck nach dem reziproke Abstandgesetz
"1/r". (-6 dB bei doppelter Entfernung)
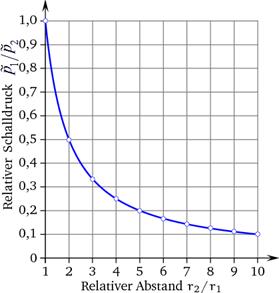
Abbildung.
Abstandgesetz 1/r. [http://www.sengpielaudio.com/Rechner-abstandsgesetz.htm
]
Addieren von dB-Werten ist
schwierig. Wenn eine Schallquelle mit einer zweiten Schallquelle vom selben
Schalldruckpegel ergänzt wird, ist der Pegel mit 3 dB erhöht. Die Ursache dafür
ist, dass beim Addieren müssen die Logarithmen von quadratischen Größen addiert
werden (wie bei Schallleistung, da es hier um die Verdopplung von der
Schallenergie geht).

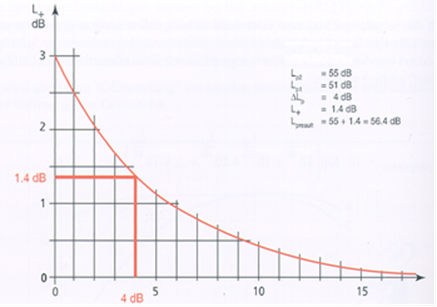
Abbildung.
Hilfsdiagram für Addieren von Pegelwerten.
[http://www.bksv.com/]
*******************************************************************************************************************************************************
2. Schallausbreitung in verschiedenen Umgebungen
2.1
Quellen
Mathematische Modellbildung =
Punktquelle. Eine Punktquelle ist "unendlich klein", oder im
Gegensatz zur Wellenlänge sehr klein. Da Lautsprecher und andere Schallquellen
mehrere Frequenzen ausstrahlen können und eine wirkliche Größe haben, können in
der Praxis nicht als Punktquelle betrachtet werden. Selten können wir
Schallquellen als Linienquelle (Straße, Tunnel) betrachten.

Abbildung. Kugelförmige
Wellenfront.
[http://www.mpia-hd.mpg.de/~hippler/AOonline/C05/ao_online_05_01.html]
Die zwei wichtigsten Wellen sind Kugelwellen
und ebene Wellen. Bei Ebene Welle sind Wellenfronten Ebenen senkrecht
zur Ausbreitungsrichtung. Bei Kugelwelle sind Wellenfronten Oberflächen
konzentrischer Kugeln um die Quelle. Selten kommen auch Zylinderwellen vor.
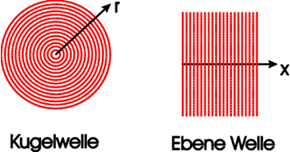
Abbildung. Kugelwelle
und ebene Welle.
[http://mv-sirius.fh-offenburg.de/Physik/wellen.htm]
In idealer Schallausbreitung
entsteht eine Kugelwelle. Bei der Kugelwelle verteilt sich die Energiedichte
auf immer größere Flächen, d. h. sie nimmt mit 1/r2 ab. Daraus
ergibt sich eine Abnahme des Schalldrucks mit 1/r. (Quadratische
Energie-Abstandsgesetz).
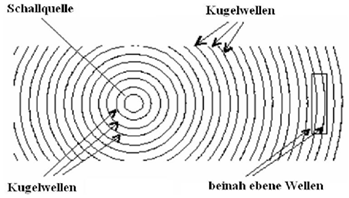
Abbildung.
Kugelwellen weit von der Schallquelle können als beinah ebene Wellen angesehen
werden.
[http://mv-sirius.fh-offenburg.de/Physik/wellen.htm]
Das 1/r2-Abstandsgesetz
der Bestrahlungsstärke gilt in der Umgebung eines punktförmigen, isotropen
Strahlers. Die Überlegungen gelten für jede beliebige Art der Strahlung,
solange die Strahlung nicht absorbiert wird.
Um diese Voraussetzungen zumindest annähernd zu realisieren, muss man den
Abstand r zwischen der Strahlenquelle und dem Messort
viel größer wählen als die Ausdehnung der Strahlenquelle (Fernfeld).
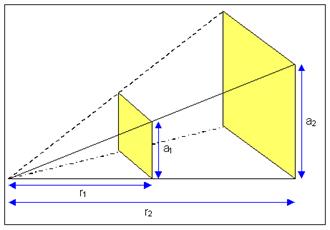
Abbildung.
Darstellung von Oberflächen bei doppelter Entfernung.
[http://www.stmary.ws/highschool/physics/home/notes/electricity/staticelectricity/animations/InverseSq.html]
2.2
Freies und diffuses Schallfeld
Unter Freifeld (Direktfeld)
versteht man eine Schallsituation, in der keinerlei Reflexionen auftreten. Im
Freifeld wird der gesamte Schall durch den Direktschall bestimmt.
Freifeldbedingungen finden sich in der Natur nur, wenn z. B. Reflexionen am
Boden keine Rolle spielen. Insbesondere in der akustischen Messtechnik und bei
Hörversuchen Freifeldbedingungen eine große Rolle, da dann die Ergebnisse nur
von dem Schall der Schallquelle beeinflusst werden und nicht von Reflexionen
des Raums. Im Freifeld ist das 1/r - Gesetz gültig. Bei der Messtechnik
verwendet man spezielle Messkabinen wie schalltoter Raum und Hallraum.

Abbildung.
Auto im schalltoten Raum.
[http://www.architekten24.de/]

Abbildung.
Schalltoter Raum für Hörversuche in der Psychoakustik.
[http://ear.berkeley.edu/anechoic-chamber.html]
Der Abstand, bei dem Direktschall
und Diffuser Schall den gleichen Pegel erreichen, wird als Hallradius
bezeichnet.
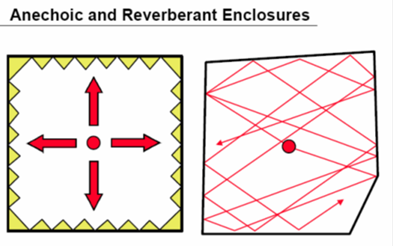
Abbildung.
Schalltoter Raum (links) und Hallraum (rechts) bei einer Schallquelle.
[http://www.bksv.com/]

Abbildung.
Hallraum mit reflektierenden Oberflächen für viele Reflexionen. Hier werden
z.B. Absorptionskoeffizienten gemessen.
[http://w3fk05vs-n.hm.edu/fakultt/faqs_2/klima.de.html]
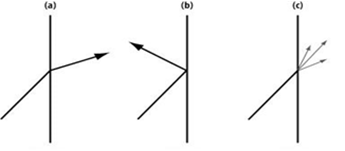
2.3
Wellenausbreitung mit Hindernissen
Schallwellen in der Wirklichkeit
breiten sich nicht unter Freifeldbedingungen aus, sondern treffen sich mit
Hindernissen. Hierzu gehört auch die Durchströmung durch Öffnungen. Die drei
wichtigsten Phänomene sind:
Refraktion
(a), Reflexion (b) und Diffraktion (c).
Reflexion
Die Schallreflexion ist mit der
Optik vergleichbar, wenn die Abmessungen des Reflektors mindestens die
fünffache Wellenlänge haben. Hierfür gilt die Regel Einfallswinkel =
Reflexionswinkel auch für gekrümmte Flächen. An der Reflexionsfläche kann sich
die Schallquelle spiegeln und auf der anderen Seite der Fläche abbilden. Diese
neue Schallquelle wird als Spiegelschallquelle bezeichnet. Reflexionen können
Echo verursachen.
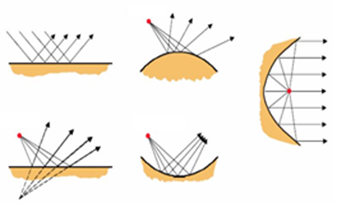
Abbildung.
Varianten von Reflexionen.
Refraktion
Die Schallbrechung, auch
Refraktion, ist ein grundlegendes Phänomen. Trifft eine Schallwelle unter einem
gegebenen Einfallswinkel schräg auf eine Grenzfläche auf, so wird ein gewisser
Anteil in das Medium zurückgeworfen, während ein anderer Anteil in das
aufnehmende Medium eindringt und sich dort weiter ausbreitet. Dabei erfährt der
Schall eine Richtungsänderung.
Abbildung.
Animation von Refraktion.
[http://www.physics.ucdavis.edu/Classes/Physics9B_Animations/ReflRefr.html]
Diffraktion
Die Beugung oder Diffraktion ist
die Ablenkung von Wellen an einem Hindernis. Durch Beugung kann sich eine Welle
in den Raumbereichen ausbreiten, die auf rein geradem Weg durch das Hindernis
versperrt wären. Zur Beugung kommt es durch Entstehung neuer Wellen entlang
einer Wellenfront gemäß dem huygens-fresnelschen
Prinzip. Diese können durch Überlagerung zu Interferenzerscheinungen führen.
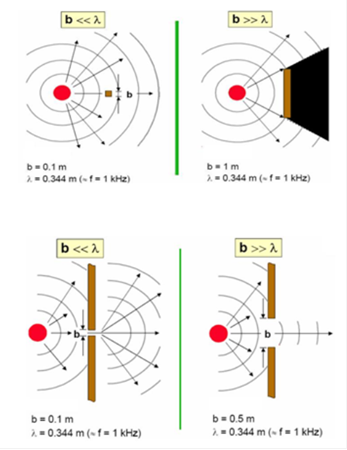
Abbildung.
Abbildungen zeigen die Abhängigkeit der Diffraktion/Diffusion im Zusammenhang
von Wellenlänge und Größe.
[http://www.bksv.com/]
Abbildung.
Diffusion durch ein Loch.
2.4
Nachhall
In einem geschlossenen Raum
entstehen neben der direkten Welle auch indirekte Schallwege. Der Schall
erreicht den Empfänger (Ohr, Mikrofone) durch den direkten Weg am schnellsten.
Später und gedämpfter, indirekte Schallwege entstehen durch primäre und
sekundäre Reflexionen. Die späteren, durch mehrere Reflexionen interferierenden
Wellen verursachen die Nachhall, die "Halligkeit". Diese sind für die
subjektive "Raumwahrnehmung" sehr wichtig.
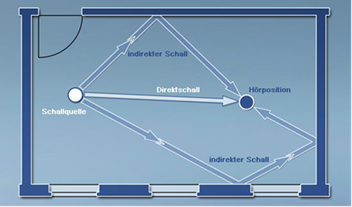
Abbildung.
Direktschall und indirekter Schall in einem Raum.
[http://www.bksv.com/]
Die Nachhallzeit (T60 oder
auch einfach RT) ist die bekannteste raumakustische Kenngröße. Unter der
Nachhallzeit versteht man das Zeitintervall, innerhalb dessen der Schalldruck
in einem Raum bei plötzlichem Verstummen der Schallquelle auf den tausendsten
Teil seines Schalldruck-Anfangswerts abfällt, was einer Pegelabnahme von 60 dB
entspricht.
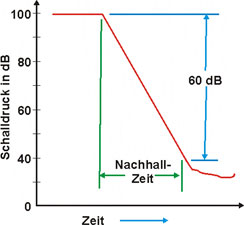
Abbildung.
Die Nachhallzeit.
[http://www.renox.at]
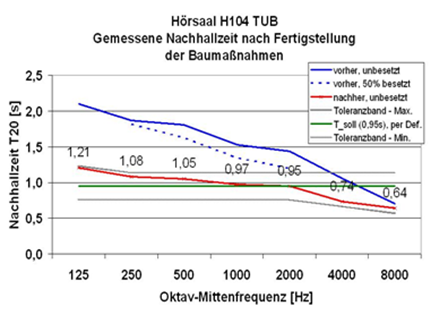
Abbildung.
Beispiel für eine Nachhallzeitmessung in einem Hörsaal der TU Berlin.
[http://www.ak.tu-berlin.de/menue/forschung/forschungsprojekte/wellenfeldsynthese/raumakustische_konzeption]
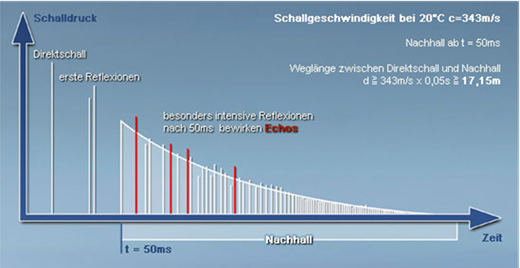
Abbildung.
Darstellung von Nachhall. Wenn Entfernungen grösser als 17 m in einem Raum
entstehen bekommen wir Echo.
[http://www.bilder-plus.de/nachhall.php]
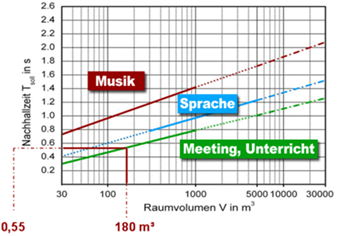
Abbildung.
Nachhallzeit als Funktion von Baugröße.
[http://www.akustikkunst.de/raumakustik/raumakustische-grundlagen.html]
2.5
Berechnung der Nachhallzeit
Die Nachhallzeit kann gemessen
und/oder mathematisch eingeschätzt werden. Es gibt zwei wichtige Formeln.
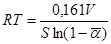
RT ist abhängig von: Raumvolumen
(V) und Absorption (A). Wenn RT nicht zu klein ist kann man die Sabine-Formel
anwenden:
|
|

wo RT ergibt sich in [sec], wenn V
ist m3 und A ist m2. Die Dimension von 0,161 ist
[s/m].
A ist hier nicht die Oberfläche, sondern:
|
|

wo S ist Oberfläche in m2.
Der Absorptionskoeffizient Alfa
ist in der Praxis vorgegeben (Tabellen). Es kann sowohl gemessen oder
kalkuliert werden:
Alfa = absorbierte
Energie/einfallende Energie.
Alfa ist frequenzabhängig. Diese
Formel ist für größeren RTs verwendbar (isotrope Bestrahlung vorausgesetzt, Raummoden
vernachlässigt). Je grösser A oder kleiner RT ist, umso ungenauer das
Ergebnis wird.
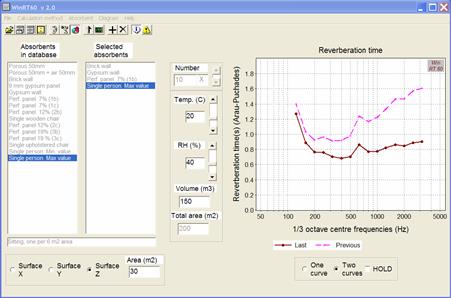
Abbildung. Es
gibt viele Anwendungen für Nachhallzeitberechnungen (Screenshot WinRT60).
[http://www.nvo.com/winmls/winrt60/]
Für kleinere RTs ist die Eyring-Formel anwendbar:
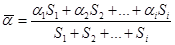
mit einem gemittelten Alfa:
und
|
|

Das Ergebnis ist genau, wenn die
Alfas sind gleich groß (Nachteil). Es ist aber mathematisch korrekt, da für den
schalltoten Raum (Alfa = 1) RT null ist.
*******************************************************************************************************************************************
3. Das Gehör und die Wahrnehmung von Vibrationen
3.1 Das
Hörorgan
Die Wahrnehmung von akustischen
Signalen wird davon mitbestimmt, wie Schallschwingungen auf ihrem Weg vom
Außenohr über das Mittelohr hin zu den Nervenzellen des Innenohrs jeweils
umgeformt und verarbeitet werden.
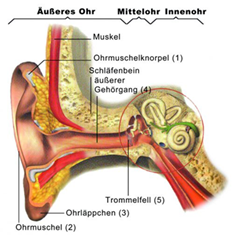
Abbildung. Aufbau
des menschlichen Ohres
[http://www.organmodelle.de/ohrmodell.html]
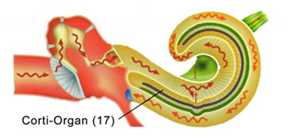
Abbildung.
Aufbau des Innenohres.
[http://www.organmodelle.de/ohrmodell.html]
Abbildung.
Animation über die Funktionsweise des Aussenohres.
[http://www.dasp.uni-wuppertal.de/ars_auditus/physiologie/mittelohr1.htm]
Weitere Videos finden Sie hier: http://www.youtube.com/watch?v=FZHeXwb65JA,
http://www.youtube.com/watch?v=tVEe_dXamtQ
3.2 Die
Hörfläche
Die Hörfläche, auch Hörbereich
oder Hörfeld, ist jener Frequenzbereich und Pegelbereich von Schall, der vom
menschlichen Gehör wahrgenommen werden kann. Die Hörfläche kann auch das individuelle
Hörvermögen eines einzelnen Menschen beschreiben. Die Hörfläche wird unten (d.
h. für niedrige Pegel) von der Hörschwelle, also dem gerade noch hörbaren
Schalldruckpegel, und oben von der Schmerzschwelle bestimmt. Links wird die
Hörfläche von der tiefsten vom Menschen hörbaren Frequenz mit etwa 16 Hz bis 21
Hz und rechts von der höchsten hörbaren Frequenz mit etwa 16kHz bis 20 kHz
begrenzt. Die Unbehaglichkeitsschwelle liegt auf der Hörfläche etwas unterhalb
der Schmerzschwelle und ist ebenfalls frequenzabhängig. Die Hörschwelle liegt
zwischen 2000 Hz und 5000 Hz am niedrigsten, dort hört der Mensch also am
besten, hier treten auch die meisten Laute der gesprochenen Sprache auf.
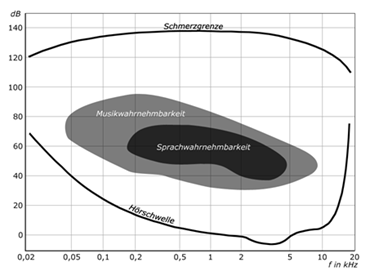
Abbildung.
Die Hörfläche.
[hoerflache.png,
wikipedia.org]
3.3 Die
Lautheit
Die Lautheit ist eine durch
Normen festgelegte Größe zur proportionalen Abbildung des menschlichen
Lautstärkeempfindens. Die Maßeinheit der Lautheit ist sone.
Die Lautheit verdoppelt sich, wenn der Schall als doppelt so laut empfunden
wird. Es ist ein psychoakustischer Begriff. Es ist empfehlenswert zu merken,
dass eine Erhöhung von ca. 6-10 dB des Schalldruckpegels resultiert in der
Verdopplung von der subjektiven Lautheit ("zweimal so laut")!
Lautstärkepegel in phone ist eine andere
Größe. Für die Umrechnung gilt:
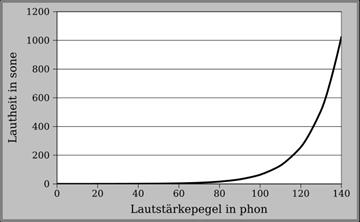
Abbildung.
Umrechnung zwischen Phone und Sone.
[http://de.wikibooks.org/wiki/Grundlagen_der_Akustik:_Lautst%C3%A4rke_und_Lautheit]
Equal-Loudness Levels, also die Kurven der gleichen
Lautstärke zeigen Phone-Kurven wo Schallereignisse die gleiche Empfindung von
Lautstärke geben.
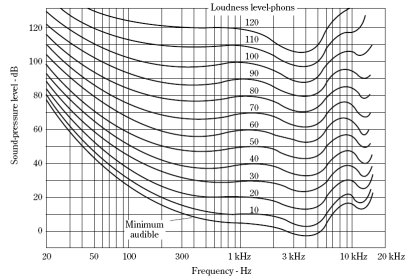
Abbildung.
Kurven der gleichen Lautstärke.
[http://www.edn.com/design/audio-design/4015888/Using-the-Decibel--Part-5-The-Phon-Audible-Frequency-Range-and-THD]
3.4 Das
Richtungshören
Richtungshören (räumliches Hören,
akustische Lokalisation) ist die Fähigkeit, die Richtung einer Schallquelle zu
bestimmen. Richtungshören erfolgt im allgemeinen durch den Vergleich des auf
zwei am Körper unterschiedlich platzierten Ohren auftreffenden Schalls wird
daher auch binaurales Richtungshören genannt). Zur
neuronalen "Berechnung" der Schallrichtung werden folgende Kriterien
herangezogen:
Die zeitliche Differenz, d.h. die Zeitspanne, die
zwischen dem Ankommen einer Schallwelle am linken bzw. rechten Ohr liegt, wenn
sich die Schallquelle seitlich des Hörers befindet (Interaural
Time Difference, ITD).
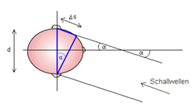
Abbildung.
Erstehung von ITD.
[http://www.dasp.uni-wuppertal.de/ars_auditus/ueberfunktion/funk24.htm]
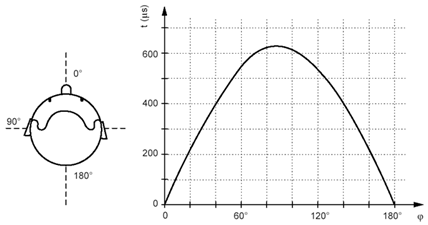
Abbildung.
ITD als Funktion von Winkel.
[Wersényi Gy. – Pszichoakusztika és az emberi
térhallás alapjai, 2012, Universitas Kiadó]
- Die
Differenz des Schalldrucks. Die von einer seitlich vom Hörer befindlichen
Schallquelle ausgesandten Schallwellen werden auf dem Wege zu dem der
Schallquelle abgewandten Hörorgan beim Durchtritt durch den Schädel
gedämpft (Interaural Level Difference,
ILD).
- Unterschiede
in der Klangfarbe. Diese resultieren daraus, dass beim Durchtritt durch
den Schädel höhere Töne stärker gedämpft werden als tiefere. Außerdem
beeinflusst die Form der Ohrmuschel je nach Richtung des Schalls dessen
Klangfarbe, wodurch auch monaurales Richtungshören möglich wird. Dieses
wird durch die Aussenohrübertragunsfunktionen
(HRTF) beschrieben.
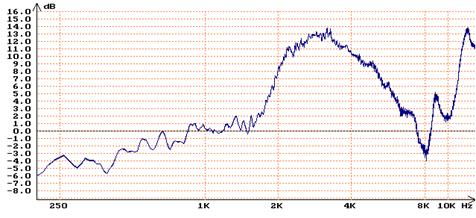
Abbildung.
HRTF von einem Ohr aus der Richtung "vorne". Schallwellen werden mit
diesem "Filter" richtungsabhängig gefiltert.
[Wersényi Gy. – Pszichoakusztika és az emberi
térhallás alapjai, 2012, Universitas Kiadó]
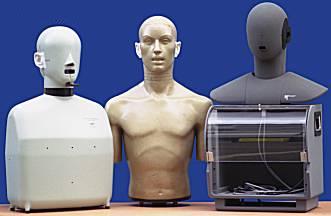
Abbildung.
Kunstköpfe für binaurale Messungen und Aufnahmen.
[http://www.isvr.co.uk/audioetc/earsimulators.htm]
3.5
Verdeckung
Maskierungseffekte (auch
Verdeckung genannt) bewirken beim menschlichen Gehör, dass
der Mensch in einem Geräusch bestimmte Frequenzanteile nicht oder nur mit
verringerter Sensitivität wahrnehmen kann. Interferenz
von Signalen können also Verdeckung verursachen. Laute tiefere Frequenzen
überdecken leise höhere Frequenzen. Es wird auch in digitale Kodierungen
genutzt, z.B. MP3-Kodierung kann bis zu 12:1 Datenreduktion führen.
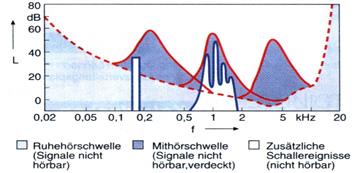
Abbildung.
Verdeckung von Sinustönen.
[http://www.fh-wedel.de/]
3.6
Subjektive Vibroakustik
Subjektives Schwingungsempfinden
ist in der Akustik ebenso wichtig. Im Fall von mechanischen Schwingungen kann
es eine Störung bei hohen Amplituden und längerer zeitlicher Einwirkung zu
gesundheitlichen Beeinträchtigungen kommen. Die Empfindlichkeit eines Menschen
auf Schwingungseinwirkung kann psychophysisch bestimmt werden. Wenn wir die
Beschleunigung in dB angeben möchten, ist der Bezugswert REF=10-6
m/s2 und L = 20 log (a/REF). Die Empfindlichkeit des Menschen ist
bezüglich Schwingungen im Bereich zwischen 4 und 10 Hz am größten. Die noch
wahrnehmbare Vibrationspegel-Unterschiedsschwelle ist ca. 1,6 dB.
Die Empfindung ist abhängig von
der Schwingungsfrequenz. Tieffrequente Schwingungen
bis ca. 50 Hz werden vom Menschen bei körperlichem Kontakt unmittelbar als
Vibration wahrgenommen. Schwingungen bis ca. 1 kHz sind als Körperschall immer
noch von Bedeutung (wenn durch ihn Luftschall angeregt wird der auch vom Ohr
wahrgenommen wird). Zwischen 20 und 100 Hz sind Schwingungen sowohl hörbar als
auch fühlbar. Das nennt sich "Rauheit" (Harshness).
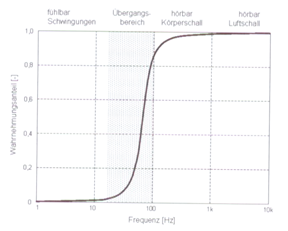
Abbildung.
Vibroakustische Wahrnehmungsbereiche.
[P. Zeller –
„Handbuch Fahrzeugakustik“ Vieweg&Teubner Verlag,
2012.]
*******************************************************************************************************************************************
4. Mechanische und akustische Elemente
4.1
Elemente und Netzwerke
Akustische Netzwerke können wie
die elektrischen und mechanischen Netzwerke dargestellt und modelliert werden.
Akustik ist ein Teil der Mechanik.
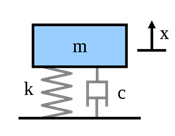
Abbildung.
Masse-, Feder-, Dämpfer-System.
[http://de.wikipedia.org/wiki/Erzwungene_Schwingung]
Ein gutes Beispiel sind Mikrofone
und Lautsprecher besitzen einen elektromechanischen Wandler, welcher die
mechanischen Schwingungen in elektrische Schwingungen umwandeln, oder
umgekehrt.
4.2
Modelle mit konzentrierten Systemparametern
In der Elektronik gibt es:
- reine
Induktivität (L, Spule);
- reine
Kapazität (C, Kondensator); und
- realer,
frequenzunabhängiger Verlust in Form von Widerständen (R),
- und
die Impedanzen.
In der Mechanik gibt es:
- Masse
(m),
- Feder
(C) und
- mechanischer
Widerstand (R).
Statt Federkonstante D
beschreiben wir einen Feder mit der reziproke Federkonstante
("Steifigkeit"): C=1/D. Ein solches System nennt man auch
Feder-Masse-Systeme.

4.3
Resonanz
Resonanz ist in Physik und Technik
das verstärkte Mitschwingen eines schwingungsfähigen Systems. Bei periodischer Anregung muss die Anregungsfrequenz in der Nähe einer
Resonanzfrequenz des Systems liegen.
Ist das System nicht zu stark
gedämpft, kann es dabei um ein
Vielfaches stärker ausschlagen (Resonanzüberhöhung) als in dem
Fall, dass dieselbe Anregung nicht periodisch, sondern mit konstanter Stärke einwirken würde. Das Phänomen kann
bei allen schwingfähigen physikalischen und
technischen Systemen auftreten.
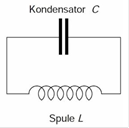
In der Elektronik benutzt man
Induktivität und Kapazität für einen verlustfreien Resonator: die Energie
oszilliert in sinusförmigen Wellen. In der Mechanik sind es Masse und Feder.
Ein Federpendel oder Federschwinger ist ein harmonischer Oszillator, der aus
einer Schraubenfeder und einem daran befestigten Massestück besteht, welches
sich geradlinig längs der Richtung bewegen kann, in der Feder sich verlängert
oder verkürzt. Sofern sich die Masse in Lotrichtung bewegt, beeinflusst die
Schwerkraft die Ruhelage. Beim Loslassen des aus seiner Ruhelage ausgelenkten
Federschwingers beginnt eine harmonische Schwingung, die bei fehlender Dämpfung
nicht mehr abklingt.
Abbildung.
Feder-Masse-System
[http://en.wikipedia.org/wiki/Vibration]
Die ideale Masse ist:
- inkompressibel,
d.h. jeder Punkt der Masse bewegt sich mit der gleichen Geschwindigkeit.
- Beschreibungsgleichung:
F = ma (Newton Gesetz).
Die ideale Feder ist:
- Steifigkeit
unabhängig von der Auslenkung.
- Beschreibungsgleichung:
F = sx (Hookesches
Gesetz).
- über
der Feder fällt keine Kraft ab.
Der Ideale Reibwiderstand:
- Geschwindigkeitsproportionale
Reibung.
- Beschreibungsgleichung:
F = Ru.
- Über
dem Reibwiderstand fällt keine Kraft ab.
Die mechanische Quellen sind
entweder Kraftquellen (Kraft ist unabhängig von Geschwindigkeit) oder
Geschwindigkeitsquellen (Geschwindigkeit ist unabhängig von Kraft).
In der Akustik ist es auch Masse
und Federung.
Die akustische Masse ist:
- Beschleunigte
aber nicht komprimierte Luft.
- Realisierung:
Röhrchen mit Länge (l), Durchmesser (d), wobei d<<l<<λ.
- Alle
Teilchen der Luft bewegen sich gleichzeitig.
Abbildung.
Abbildung zeigt stehende Wellen in einem geöffneten Röhrchen: longitudinale
akustische stehende Wellen in einem Röhrchen mit Öffnungen an beiden Enden
(akustische Masse). Oben sieht man die größte Wellenlänge (Grundfrequenz)
welche sich bilden kann. Die Auslenkung hat Knoten (Nullpunkt) in der Mitte und
Maxima am Ende des Röhrchens. Die Entfernung entspricht hier halber
Wellenlänge. Die beiden anderen Bilder zeigen höhere harmonische (zweite und
dritte).
[http://www.acs.psu.edu/drussell/demos.html]
Die akustische Federung ist:
- komprimierte
aber nicht beschleunigte Luft.
- Realisierung:
Hohlraum (Volumen V) mit größter Abmessung (l), wobei l<< λ.
- adiabatisches
Verhalten (kein Temperaturausgleich).
- Position
der Öffnung des Volumens ist unbedeutend.
Abbildung
Stehende Wellen in einem Hohlraum: longitudinale akustische stehende Wellen in
einem Hohlraum mit Öffnung nur an einem Ende (akustische Federung). Oben sieht
man die größte Wellenlänge (Grundfrequenz) welche sich bilden kann. Die
Auslenkung hat Knoten (Nullpunkt) an der Wand und Maximum an der Öffnung. Die
Entfernung entspricht einer Viertel der Wellenlänge. Die beiden anderen Bilder
zeigen die nächsten zwei harmonischen (dritte und fünfte).
[http://www.acs.psu.edu/drussell/demos.html]
Der akustische Widerstand ist:
- Verlustelement,
wandelt Schallenergie in Wärme um.
- Realisierung:
poröse Materialien, Siebe.
- akustischer
Widerstand eines engen Röhrchens ist immer auch von einer akustischen
Masse begleitet.
- für
kleine Durchmesser und tiefe Frequenzen kann die Wirkung der Masse
vernachlässigt werden.
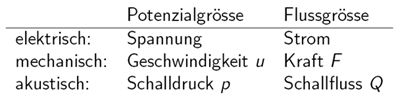
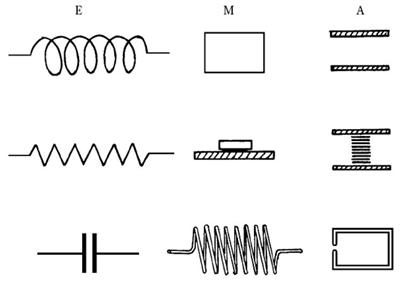
Abbildung.
Potenzial- und Flussgrössen.
[P. Zeller –
„Handbuch Fahrzeugakustik“ Vieweg&Teubner Verlag,
2012.]
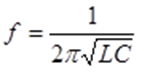
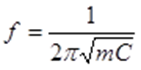
Die Eigenfrequenz eines
schwingfähigen Systems ist eine der Frequenzen mit der das System nach
einmaliger Anregung schwingen kann (bei Vernachlässigung der Dämpfung). Wenn
einem solchen System von außen Schwingungen aufgezwungen werden deren Frequenz
mit einer der Eigenfrequenzen übereinstimmt reagiert das System mit besonders
großen Amplituden was man als Resonanz bezeichnet. Eigenfrequenzen aus der
Elektronik, Mechanik und Akustik:
Ein Helmholtz-Resonator ist ein
akustischer Resonator. In der Akustik ist die akustische Masse und Federung für
einen Resonator nötig. Ein Helmholtz-Resonator hat eine Masse und eine
Federung, d.h. einen Hohlraum und ein Röhrchen zusammengeknüpft. Ein solcher
Resonator funktioniert als Absorber an der Resonanzfrequenz, wo c ist
Schallgeschwindigkeit, A ist Oberfläche des (Flaschen)halses, l ist die Länge des Halses, V ist
Volumen. Wir müssen annehmen, dass V >> Al.
Abbildung.
Helmholtz-Resonator (Flasche mit Hals).
[http://fisicaondemusica.unimore.it/Risuonatori_di_Helmholtz_en.html]
Abbildung. Veränderung der Eigenfrequenz eines
Helmholtz-Resonators als Funktion vom Hals (oben) bzw. Volumen (unten).
[http://www.phys.unsw.edu.au/jw/Helmholtz.html] [http://fisicaondemusica.unimore.it/Risuonatori_di_Helmholtz_en.html
]
4.4
Interferenz
Interferenz beschreibt die
Überlagerung von zwei oder mehr Wellen nach dem Superpositionsprinzip (Addition
ihrer Amplituden). Es zur vollständigen destruktiven oder konstruktiven
Interferenz führen.
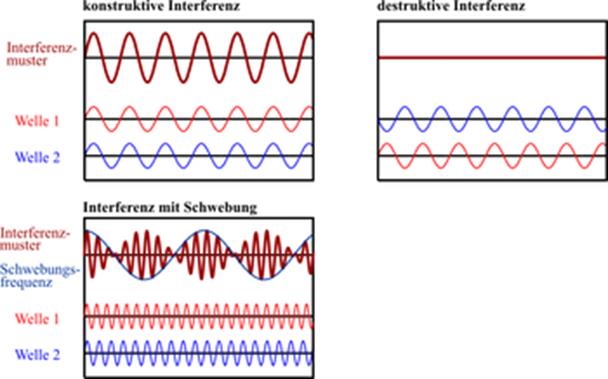
Abbildung.
Interferenz zweier Wellen.
[http://neu.8goals4future.at/DE_WIKIPEDIA_O/WIKI/INTERFERENZ_PHYSIK_.HTM]
Eine stehende Welle
entsteht aus der Überlagerung zweier gegenläufig fortschreitender Wellen
gleicher Frequenz und gleicher Amplitude. Die Wellen können aus zwei
verschiedenen Erregern stammen oder durch Reflexion einer Welle an einem
Hindernis entstehen. Bei einer stehenden akustischen Welle ist das Medium nicht
im Ruhestand, aber Maxima und Minima der Schalldrucks und Teilchengeschwindigkeit
verschieben sich nicht. Die Knotenpunkte haben eine Entfernung von einer halben
Wellenlänge. Solche stehende Wellen entstehen an Mediengrenzen, wo reflektierte
Wellen mit den direkten Wellen aufeinander treffen. In der Praxis ist eine Wand
weder "fest" noch "weich". In diesem Fall wird ein Teil der
Wellenenergie absorbiert und nur mit geschränkter Amplitude reflektiert.
Abbildung.
Entstehung einer stehenden Welle.
[http://www.physics.ucdavis.edu/Classes/Physics9B_Animations/SinesCollide.html]
Abbildung.
Schalldruck und Auslenkung bei einer stehenden Welle.
[http://www.acs.psu.edu/drussell/demos.html]
Abbildung.
Harte und weiche Grenze.
[http://www.acs.psu.edu/drussell/demos.html]
4.5
Moden
Zwischen zwei Reflektoren können
sich nur stehende Wellen mit bestimmten Wellenlängen bilden. Alle möglichen
Wellenlängen werden als Eigenfrequenzen oder Eigenresonanzen bezeichnet. Welche
Randbedingung dazu führt, dass die Wellenlängen nicht beliebig sein können,
hängt von der Art der betrachteten Welle ab. z.B. muss bei fest eingespannten
Enden einer schwingenden Saite an beiden Enden jeweils ein Schwingungsknoten
vorliegen. Bei einer stehenden (akustischen) Longitudinalwelle tritt an jeder
reflektierenden Wand in einem Raum immer ein Schalldruckbauch auf (Raummoden).
Abbildung. Raummode.
Abbildung.
Moden bei einer schwingenden Platte.
[http://de.wikipedia.org/wiki/Moden]
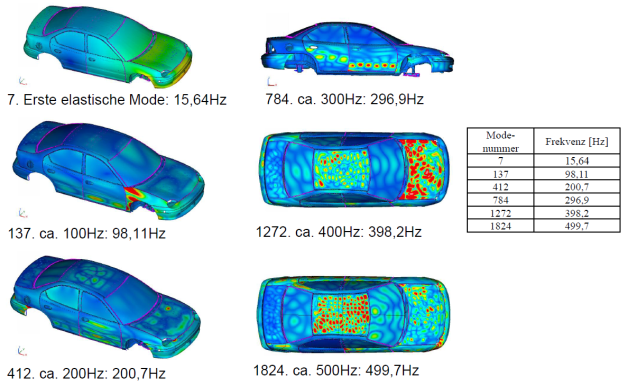
Abbildung.
Moden eines Fahrzeugs.
[AUDI]
*****************************************************************************************************************************************
5. Akustische Elemente
5.1
Mikrofone
Ein Mikrofon ist ein
Schallwandler, der Luftschall als Schallwechseldruckschwingungen in
entsprechende elektrische Spannungsänderungen als Mikrofonsignal umwandelt.
Erwartung ist ein breiter Frequenzumfang, hohe Empfindlichkeit und eine
Umwandlung frei von Verzerrungen. Das Herz jedes Mikrofons ist der
elektromechanische Wandler: elektrodynamisch oder Kapazität (kondensator) Typ.
Die Empfindlichkeit
(Sensitivität) eines Mikrofons ist die Ausgangsspannung im Verhältnis zum
einfallenden Schalldruck. Gemessen wird es bei 1 kHz in der Symmetrieaxe
in [mV/Pa] oder dB.
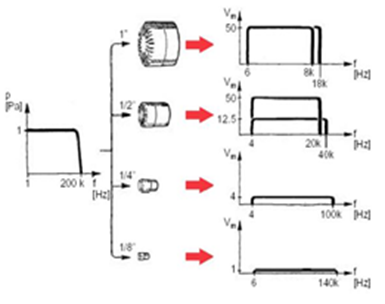
Abbildung.
Zusammenhang zwischen Frequenzbereich und Empfindlichkeit.
[http://www.bksv.com/]
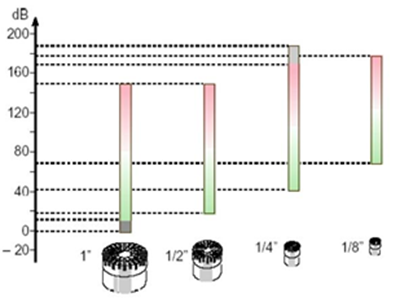
Abbildung.
Zusammenhang zwischen Empfindlichkeit und Membrandurchmesser.
[http://www.bksv.com/]
Die Übertragungsfunktion
ist die Empfindlichkeit als Funktion der Frequenz. Messmikrofone sind
"flach" (frequenzunabhängig). Die Richtcharakteristik
beschreibt in Form eines Polardiagrams die Empfindlichkeit des Mikrofons. Es
ist die Ausgangsspannung im Verhältnis zum Schalldruck, in Abhängigkeit vom
Schalleinfallswinkel.
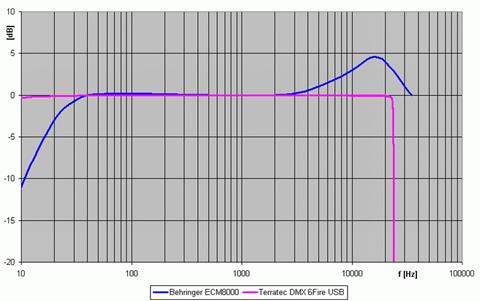
Abbildung.
Übertragungsfunktionen von Mikrofonen.
[http://www.stroemlinge.de/index_AstraHGTC_Musikanlage_SPLMessung.html]

Abbildung.
Messung für Mikrofone im schalltoten Raum.
[http://www.schalllabor-hamburg.de/technische-akustik]
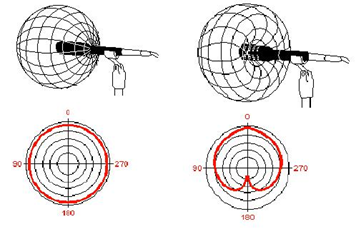
Abbildung.
Richtcharakteristik: Kugel und Niere.
[http://audioclassroom.wordpress.com/2014/05/21/how-to-use-microphone-pickup-patterns/]
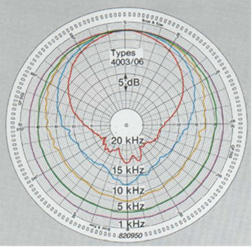
Abbildung.
Veränderung der Richtcharakteristik mit der Frequenz.
[http://www.bksv.com/]
Mikrofone wandeln
Schallereignisse erst in mechanische Energie und anschließend in elektrische
Energie um. Schall breitet sich im Medium Luft durch Schwingen der Luftmoleküle
aus. Die dabei entstehenden Druckänderungen versetzen eine ins Schallfeld eingebrachte,
gespannte Membran in mechanische Schwingungen. Bei dem bekanntesten dynamischen
Mikrofontyp ist diese Membran mit einem Spulenkörper verbunden. Die Spule
bewegt sich in einem statischen Magnetfeld und erzeugt nach dem
Induktionsgesetz an ihren Anschlüssen eine vom Schalldruck abhängige
Wechselspannung. Das Induktionsgesetz in der allgemeiner Form ΔU = -B · l
· Δv zeigt, dass die induzierte Wechselspannung
ΔU direkt proportional zur Änderungsgeschwindigkeit Δv
ist. Sie steht im direkten Zusammenhang mit den Druckänderungen, die von der
Schallquelle ausgehen. Bei gleicher mechanischer Erregung wird eine höhere
Nutzspannung induziert, je größer die magnetische Flussdichte B des Magnetfelds
ist und je mehr Windungen der Spule (n · l) im Magnetfeld bewegt werden. Für
eine Animation und weitere Information siehe:
http://elektroniktutor.oszkim.de/akustik/mikrofon.html.
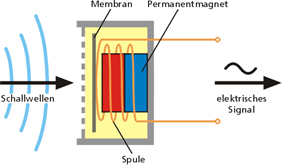

Abbildung.
Dynamisches Mikrofon (Prinzip und Abbildung).
[http://www.holmco.de/mikg.html]
Das Kondensatormikrofon
nutzt die durch Abstandsänderungen zwischen der (beweglichen) Membran und der
Gegenelektrode hervorgerufene Kapazitätsänderungen, um je nach Ausführung
Schalldruck oder Schallschnelle in ein elektrisches Signal umzuwandeln. Hier
ist eine wenige Mikrometer dicke, elektrisch leitfähige Membran dicht vor einer
- aus akustischen Gründen oft gelochten - Metallplatte elektrisch isoliert
angebracht. Technisch betrachtet ist diese Anordnung ein Plattenkondensator mit
Luft-Dielektrikum, der eine elektrische Kapazität von etwa 20 bis 100 pF besitzt. Die Kapazität C des Kondensators ist
abhängig von der Plattenfläche A und dem Abstand d der
Kondensatorplatten. Eintreffender Schall bringt die Membran zum Schwingen,
wodurch sich der Abstand zwischen Membran und Gegenelektrode und damit auch die
Kapazität des Kondensators verändert.
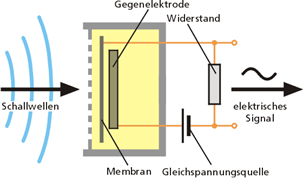
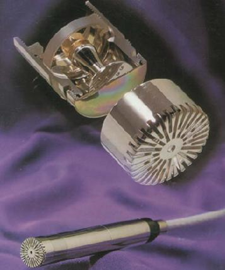
Abbildung.
Kondensatormikrofon (Prinzip und Abbildung).
[http://www.bksv.com/]
Allgemein kann man dynamische
Mikrofone wie folgend charakterisieren:
- elektrodynamischer
Wandler,
- allgemeine
Anwendungen, Aufnahmetechnik (Studio und Live),
- relativ
preisgünstig,
- relativ
schmale Bandbreite,
- keine
Spannungsversorgung nötig (passiv).
Allgemein kann man Kondensator
Mikrofone wie folgend charakterisieren:
- kapazitive
Wandlerprinzip,
- für
Messungen und Studioaufnahmen geeignet,
- teuer,
- breitbandige
Übertragung,
- Spannungsversorgung
üblicher Weise nötig (aktiv). Der Vorverstärker ist oft mit dem Mikrofon
zusammengebaut.
5.2
Lautsprecher
Im Gegensatz zur Mikrofoneinsatz
werden bei Lautsprecherwiedergabe fast nur dynamische Lautsprecher benutzt.
("Inverz Mikrofone"). Bei Lautsprechern
werden elektrische Schwingungen in Schallschwingungen umgesetzt.
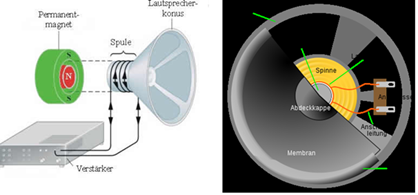
Abbildung.
Dynamischer Lautsprecher.
[http://www.leifiphysik.de/web_ph10/umwelt-technik/09lautsprech/lautsprech.htm]
Die Empfindlichkeit eines
Lautsprechers gibt den abgestrahlten Schalldruck im Verhältnis zur
Eingangsspannung bei 1 kHz in Richtung "vorne" (in Pa/V oder in dB). Frequenzgang (Übertragungsfunktion) ist
die Empfindlichkeit als Funktion der Frequenz. In der Praxis jedes
Lautsprecher-Chassis (Tieftöner, Hochtöner,
Mitteltöner) bekommt den Frequenzbereich zugeteilt
(Frequenzweichen). Andere wichtige Parameter sind:
- Richtcharakteristik
- Nennbelastbarkeit:
Die in Watt angegebene Nennbelastbarkeit des Lautsprechers gibt an, welche
elektrische Leistung der Lautsprecher im Dauerbetrieb aufnehmen kann.
- Die
maximale thermische Belastbarkeit und der maximal zulässige Membranhub.
- Die
Musikbelastbarkeit umschreibt diejenige kurzfristige (max. 2 Sekunden)
Impulsbelastbarkeit, die der Lautsprecher ohne Schäden am Material
bewältigen kann.
- Impedanz:
In der Einheit Ohm angegebener Stromwiderstand. Verstärker mit niedriger
Ausgangsimpedanz sind von Vorteil. Impedanz ist der gerundete Wert des Absolutwertes der gemessenen Impedanz auf 4, 6, oder 8
Ohm.
Lautsprecher müssen eingebaut
werden wegen akustischem Kurzschluss. Ein akustischer Kurzschluss ist ein
akustisches Phänomen verantwortlich dafür, dass Lautsprecher überhaupt Gehäuse
benötigen.
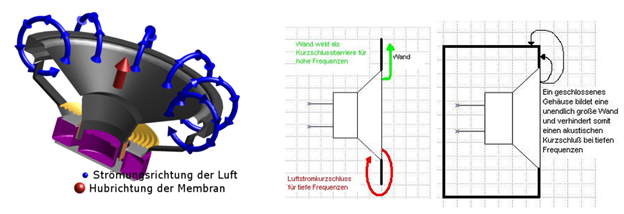
Abbildung.
Akustischer Kurzschluss.
[www.hekko.de]
Schwingt die Membran nach vorn,
wird vorderseitig die Luft verdichtet, während hinten "dünner"
(Phasendifferenz von 180 Grad). Die Luft findet (bei tieffrequenten
Schwingungen) ausreichend Zeit, druckausgleichend zwischen Vorder- und
Rückseite hin und her zu strömen. Die gegenläufigen Wellen eliminieren sich. Um
Lautsprechervorderseite und -rückseite muss akustisch isoliert werden. Mit
Hilfe einer auf der Gehäuserück-, vorder- oder Unterseite befindlichen
Austrittsöffnung wird der nach hinten austretende Schall des Basschassis
genutzt.
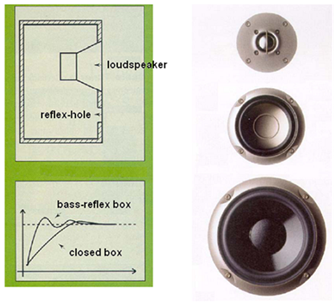
Abbildung.
Mehrweg-Lautsprecher und Bassreflex-Ausstattung.
5.3
Beschleunigungssensoren
Der wichtigste Sensor im Bereich
Schwingungsmessungen. Die Beschleunigung wird als auf eine Testmasse wirkende
Trägheitskraft bestimmt (f = ma). Die ersten hatten
eine so genannte "sensitive (empfindliche) Achse", auf der die
Prüfmasse verschiebbar angeordnet war; später wurden sie durch genauere Systeme
mit biegsamen Quarz-Stäben oder magnetisch stabilisierten Massen ersetzt.
Miniaturisierte Sensoren sind meist mit piezoelektrischen Sensoren oder als
MEMS (Micro-Electro-Mechanical
System) aufgebaut. Viele technische Anwendungen benötigen 3D Messungen.
Kleinsensoren mit einer Masse von wenigen Gramm haben Messbereiche von einigen g
bis zu hunderten g. Die Auflösung erreicht 0,01mg.
Präzisionsinstrumente mit einer Masse von mehreren Kilogramm liefern Genauigkeiten
von 10-9g.
Piezoelektrische Beschleunigungssensoren
wandeln dynamische Druckschwankungen in elektrische Signale um. Die
Druckschwankung wird durch eine an der Piezokeramik befestigte
("seismische") Masse erzeugt und wirkt bei einer Beschleunigung des
Gesamtsystems auf die Piezokeramik (Feder-Masse System). Konstante
Beschleunigungen (z. B. Erdbeschleunigung) können damit nicht erfasst werden.

Abbildung.
Piezosensoren.
[http://www.sensorsmag.com/sensors/acceleration-vibration/simple-steps-selecting-right-accelerometer-1557]
[http://www.itwissen.info/definition/lexikon/MEMS-Sensor-MEMS-sensor.html]
[http://www.althen.de/beschleunigung/egcs-s425/]
Prinzip ist dass die Kraft bei
konstanter Masse direkt proportional zur Beschleunigung wird: f = ma. Die seismische Masse im Sensor erzeugt somit bei
Beschleunigung eine Kraftwirkung auf das piezoelektrische Material, welche in
diesem wiederum eine proportionale Ladungsverschiebung zur Folge hat. Diese
wird durch einen Verstärker in eine Spannung umgewandelt (auch proportional zur
Beschleunigung). Ein Feder-Masse-System hat ein Tiefpassverhalten mit einem
linearen Frequenzbereich und einer Resonanz. Je kleiner die Masse ist, umso
größer ist die Resonanzfrequenz und kleiner die Empfindlichkeit.
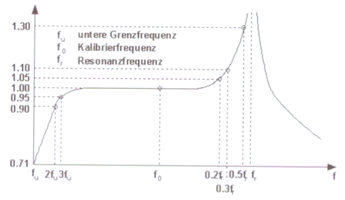
Abbildung.
Resonanz eines Sensors.
[P. Zeller –
„Handbuch Fahrzeugakustik“ Vieweg&Teubner Verlag,
2012.]
Zu der Arbeit mit Sensoren gehört
auch Fehler- und Datenbehandlung. Mögliche Fehlerquellen sind:
- unebene
oder raue Kontaktfläche,
- Nachgiebigkeit
der Kontaktfläche (bei Blech oder Kunststoff),
- zu
hohe Masse des Sensors,
- lange
Verbindungskabel.
TEDS steht für Transducer Electronic
Data Sheet. Es ist eine standardisierte Methode für
das Speichern von Wandlerdaten, Identifikation, Kalibration,
Ausgleichinformation und Herstellerinformation. Jeder Wandler und Instrument
kann sein eigenes TEDS-Datenblatt haben. Das TEDS kann
als Speicher geknüpft zu dem Sensor implementiert werden.
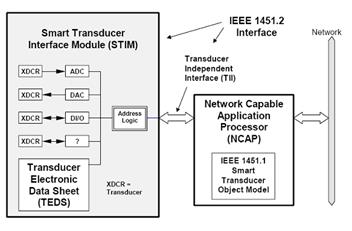
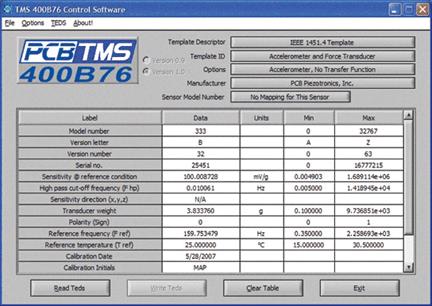
Abbildung.
TEDS.
[http://archives.sensorsmag.com/articles/1097/ieee1097/]
[https://www.pcb.com/Aerospace/Ground_Test/TEDS.aspx]
MEMS steht für miniaturisierte
Beschleunigungssensoren: Mikro-Elektro-Mechanische Systeme (MEMS) werden aus
Silizium hergestellt. Diese Sensoren sind Feder-Masse-Systeme, bei denen die
"Federn" nur wenige µm breite Silicium-Stege sind und auch die Masse
aus Silizium hergestellt ist. Durch die Auslenkung bei Beschleunigung kann
zwischen dem gefedert aufgehängten Teil und einer festen Bezugselektrode eine
Änderung der elektrischen Kapazität gemessen werden. Der gesamte Messbereich
entspricht einer Kapazitätsänderung von nur ca. 1 pF.
So muss die Elektronik zur Auswertung auf demselben Halbleiterbaustein sein.
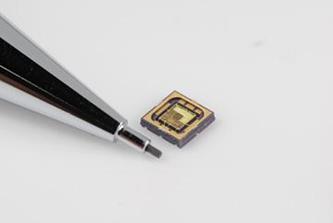
Abbildung.
Ein MEMS Sensor.
[http://www.eeweb.com/news/mems-absolute-pressure-sensor]
Vorteile sind: relativ geringer
Stückkosten (Massenfertigung) und hoher Zuverlässigkeit. Sensoren in
MEMS-Technik werden nicht nur für die Messung der (linearen) Beschleunigung,
sondern auch für die Messung der Winkelbeschleunigung hergestellt (so genannte
Gyrosensoren).
Die Vibrationsprüfung ist ein
Verfahren zur Untersuchung der durch schwingungsauftretenden Belastungen und
ihre Folgen. In erster Linie wird dieses Verfahren verwendet, um die mechanische
Festigkeit zu prüfen. Beispiel: elektronische Steuergeräte im Auto. Diese sind
beim Fahren zwangsläufig Schwingungen verschiedener Frequenz und Amplitude
ausgesetzt (z. B. Reifen, Straßenverhältnisse, Motorvibrationen durch
Massenkräfte). Damit solch ein Fehler im Fahrzeug nicht im Betrieb eintritt,
werden auf sogenannten Shakern die Vibrationsbeanspruchungen des
späteren Einsatzfalles nachgebildet. In einem Shaker bewegt sich eine Spule im
Magnetfeld und wandelt ein elektrisches Signal in eine mechanische Auslenkung
um. Frequenzbereiche für die Vibrationsprüfung von Kfz- Elektronik sind: 10 -
1000 (2000) Hz. Typische Beschleunigungswerte sind für Karosseriebau 1 - 3 g,
für Motorenbau 8 - 28 g. Für die Prüfung von sehr tieffrequenten
Schwingungen werden hydraulische Shaker eingesetzt, die auch wesentlich größere
Amplituden erzeugen können.

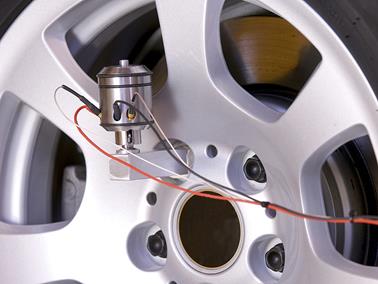
Abbildung.
Verschiedene Shaker in der KFZ-Technik.
[http://www.qualtest.com/html/New_Vibration_Capability_LDS_V9_Electrodynamic_shaker.htm]
[http://www.lmsgermany.com/Inertia-Shaker-with-integrated-sensors]
Es können in der akustischen Messtechnik
weitere Messmittel angewendet werden, wie z.B. impact
hammer, omnidirectional sound source, reference
sound source oder "start gun".




Abbildung.
Weitere Messmittel in der Akustik.
[http://www.bksv.com/]
******************************************************************************************************************************************
6. Methoden der Analyse und Messtechnik
6.1
Grundlagen zur Messtechnik
Die Fourier-Analyse (FFT) ist die
Zerlegung eines Zeitsignals in Sinusoiden zunehmender
Frequenzen, sodass durch deren Summierung (=Fourier-Synthese) das Zeitsignal
rekonstruiert wäre. Durch die Fourier-Analyse bekommt man ein Spektrum, das die
Amplituden-Werte der Sinusoiden (in dB) als Funktion
der Frequenz enthält.
[http://de.academic.ru/dic.nsf/dewiki/1164684]
Abbildung.
Entstehung von FFT Daten für verschieden Signale.
Als Verzerrung bezeichnet
man in der Elektrotechnik und in der Akustik eine nicht erwünschte Veränderung
der Form im zeitlichen Verlauf einer zeitveränderlichen Größe. Sie wird
überwiegend bei periodischen Signalen beobachtet; aber auch ein einzelner
Impuls kann in seiner Form geändert, eben verzerrt werden. In der Akustik gibt
es zur Erzielung gewisser Klangeffekte auch die gewollte Verzerrung. Man
unterscheidet "lineare Verzerrungen" und "nichtlineare
Verzerrungen".
Die nichtlineare Verzerrung,
verursacht durch ein nichtlineares System, wird vorzugsweise bei einer
Abweichung von einem ursprünglich sinusförmigen Signalverlauf bedeutsam. Diese
Art von Verzerrung lässt sich so beschreiben, dass sich zusätzliche
Sinus-Schwingungen ausbilden, die als Oberschwingungen zur ursprünglichen
Grundschwingung bezeichnet werden. Die Oberschwingungen weisen
ganzzahlig-vielfach höhere Frequenzen als die Grundfrequenz auf. Die lineare
Verzerrung entsteht in linearen Netzwerken durch deren Frequenzgang, wenn sich
Verstärker und Übertragungswege zwar linear, aber frequenzabhängig verhalten.
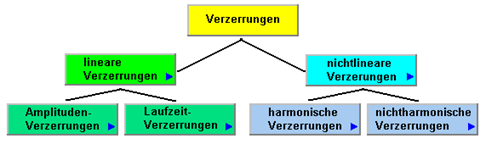
Abbildung.
Verzerrungen.
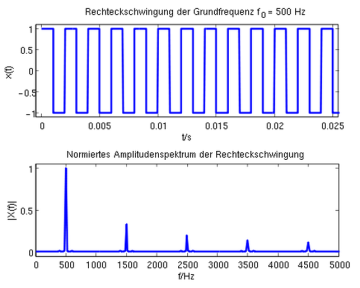
Abbildung.
Nichtlineare Verzerrungen beim Rechtecksignal.
[http://de.wikipedia.org/wiki/Rechteckschwingung]
6.2
Messsignale
In der Akustik auch, gibt es
verschieden Signale für di Messungen, so wie reiner Ton (Sinus), Impuls,
Geräusch oder Sweep. Sie können deterministisch oder random sein.
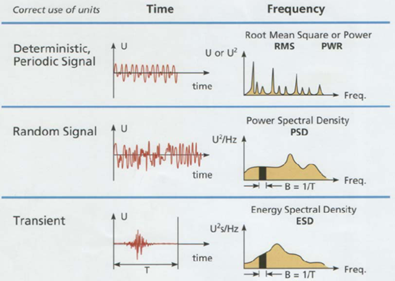
Abbildung.
Verschieden Messsignale in der Zeitdomäne und Frequenzdomäne.
[http://www.bksv.com/]
Weißes Rauschen ist ein Rauschen, das durch ein
konstantes Leistungsdichtespektrum in einem bestimmten Frequenzbereich
beschrieben wird. In der Akustik wird weißes Rauschen als ein stark
höhenbetontes Geräusch empfunden. Weißes wird in den Ingenieur- und
Naturwissenschaften häufig verwendet, um Störungen in einem sonst idealen
Modell abzubilden, z. B. zufällige Störungen in einen Übertragungskanal zu
beschreiben. Rosarauschen ist ein gefiltertes Rauschen abgeleitet von weißem
Rauschen mit -3 dB/Oktav. Dadurch entsteht ein Signal wo Signal-Rausch-Abstand
frequenzunabhängig ist.
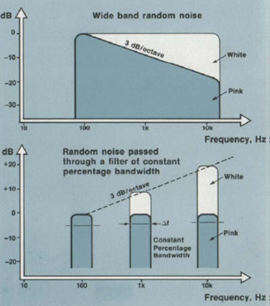
Abbildung.
Weißes und Rosarauschen in der Frequenz.
[http://www.bksv.com/]
6.3
Signal-Rausch Abstand
Sowohl bei analoger als auch
digitaler Kommunikation ist der Signal-Rausch-Abstand (engl.: signal-to-noise ratio)
ein Maß für die Stärke des Signals relativ zum Hintergrund-Rauschen. Das
Verhältnis wird oft als S/N oder SNR abgekürzt und normalerweise in Dezibel
(dB) angegeben.

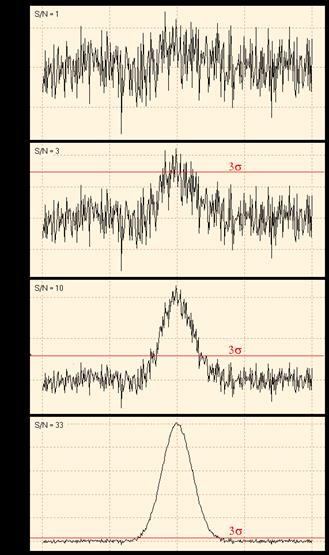
Abbildung. Im
obersten Bild ist das Nutzsignal etwa so groß wie das Rauschen des Blindwertes.
Hier ist das Signal kaum zu erkennen. Im zweiten Diagramm erreicht das
Nutzsignal gerade die Nachweisgrenze (SNR = 3). In den beiden unteren Diagrammen
liegt das Nutzsignal bei der zehnfachen bzw. 33-fachen Nachweisgrenze.
[http://www.statistics4u.info/fundstat_germ/ee_detection_limit.html]
In einem digitalen System wird als Quantisierungsrauschen bestimmte Störungen bei der
Digitalisierung von Analogsignalen bezeichnet. Da bei der digitalen
Repräsentation nur diskrete Werte möglich sind, müssen die abweichenden
analogen Messwerte gerundet werden. Der dabei auftretende Fehler - also die
Differenz von Originalsignal zu Digitalsignal - wird als Quantisierungsfehler
bezeichnet.
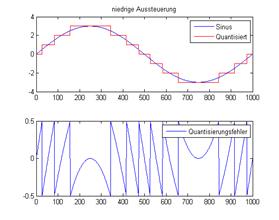
Abbildung.
Quantisierungsrauschen.
[http://de.wikipedia.org/wiki/Quantisierungsfehler]
6.4
Schalldruckpegelmesser
Der Schalldruckpegelmesser ist
ein Messinstrument um Schalldruckpegel und andere Parameter zu messen. Außer
dB-Werte kann es FFT-Analysedurchführen.
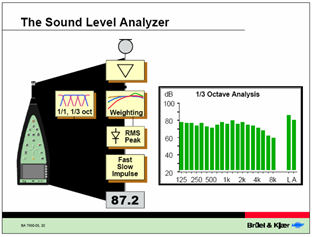

Abbildung.
Schalldruckpegelmesser.
[http://www.bksv.com/]

Abbildung.
Messergebnisse einer Nachhallzeitmessung.
[http://www.bksv.com/]
Schallfeldgrößen wie Schalldruck,
Intensität oder Pegel sind physikalische Größen, objektiv vorhanden und
messbar. Kalibration ist aber erforderlich.

Abbildung.
Kalibration ist erforderlich.
[http://www.bksv.com/]
Mit einem standardisierten
elektrischen Filter lässt sich die Empfindlichkeit eines Schallpegelmessers an
das natürliche Lautstärkeempfinden des menschlichen Gehörs angleichen (Frequenz-
und Zeitbewertung).
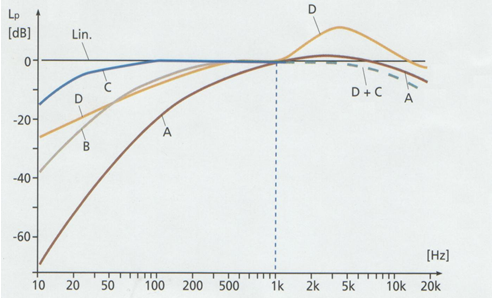
Abbildung.
Frequenzbewertungskurven, dB(A) ist das wichtigste.
[http://www.bksv.com/]
Die Messumgebung bestimmt die
Ergebnisse auch. Bestimmte Messungen werden im schalltoten Raum durchgeführt,
andere vor Ort. In diesem Fall spielen Reflexionen eine wichtige Rolle, welche
die Messungen beeinflussen. Auch die physikalische
Größe der Schallquelle muss betrachtet werden. Das Nahfeld
(a) bezeichnet den unmittelbaren Bereich um die Schallquelle, das von einem
ungleichmäßigen Wechsel zwischen Orten mit konstruktiver und destruktiver
Interferenz gekennzeichnet ist. Im Gegensatz dazu bezeichnet das Fernfeld (b) einen Bereich, der weit von der
Schallquelle entfernt ist. Das Fernfeld besteht aus
dem Freifeld (c) und aus dem Diffusfeld (d). Hier werden
Messwerte größer sein, da die reflektierte Schallenergie auch mitwirkt.
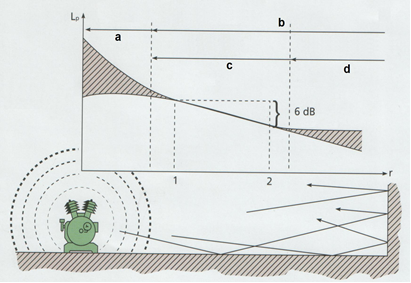
Abbildung.
Messumgebungen.
[http://www.bksv.com/]
6.4
Messtechnik
Zu den wichtigsten Methoden gehören
Messungen mit Mikrofonen, binaurale Messtechnik, TPA, Modalanalyse und
Windkanalmessungen.
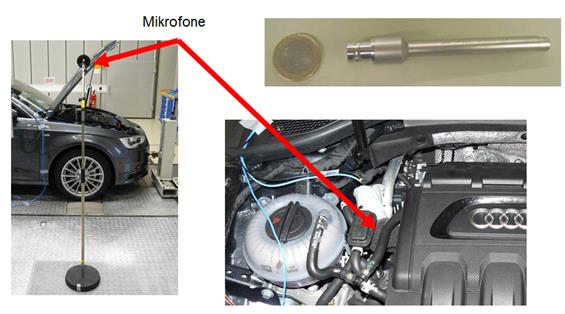
Abbildung.
Mikrofone im Einsatz.
[AUDI]
Sowohl für Mikrofonmessungen als
auch für Beschleunigungsmessungen ist eine Softwareumgebung vorausgesetzt,
welche die Signale bearbeitet und darstellt. Zum Beispiel ist dafür das System
von HEADAcoustics geeignet. Das SQLab
/ ArtemiS hat die folgenden
Parameter:
- Mehrkanal
- Analog/Digital
- Aufnahme
und Auswertung im PC
- Modular
- Stromversorgung!
- Groß
- Ohne
Ventilator

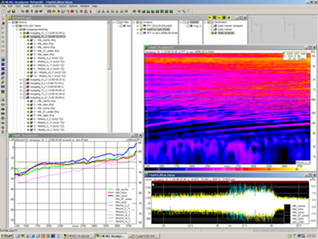
Abbildung. HEADAcoustics ArtemiS.
[AUDI]
Es gibt auch ein portables
System, namens Squadriga II:
- 8-Kanal
- Modular
- Klein,
mobil
- Aufnahme
und Wiedergabe
- Mikrofone
und Beschleunigungssensoren
- Front-end

Abbildung. Squadriga II
[AUDI]
Die binaurale Messtechnik
arbeitet mit einem Kunstkopf. Messungen und Aufnahmen können sehr realistisch
die Wahrnehmung nachbilden und dazu ist ein Kunstkopf mit eingebauten
Mikrofonen geeignet.
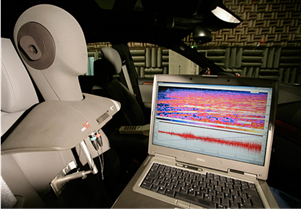
Abbildung. Binaurale
Messtechnik mit Kunstkopf.
[HeadAcoustics]
Transferpfad Analyse (TPA) ist ein weiteres
Verfahren. Die verschiedenen Ausbreitungswege zwischen Schallquelle und Ohr
nennt man Transferpfade. Die Aufgabe ist es den vibroakustischen
Energiefluss von einer oder mehreren Quellen über die relevanten Pfade zum
Empfänger aufzudecken und quantitativ zu beschreiben. Das Ziel ist bestimmte
Transferpfade unempfindlich zu machen. Die Pfade können reine
Körperschallpfade, Luftschallpfade oder eine Mischung aus beidem sein.
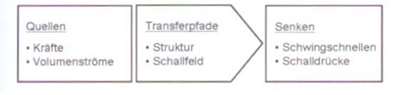
Abbildung.
TPA
[P. Zeller –
„Handbuch Fahrzeugakustik“ Vieweg&Teubner Verlag,
2012.]
Modalanalyseanalysiert die Moden. Die
Modalzerlegung ist ein in der Strukturanalyse angewandtes verfahren. Eine Struktur
kann durch ihre Eigenformen (Moden) beschreiben. Das modale Modell kann sowohl
analytisch wie auch experimentell ermittelt werden. Im niederfrequenten Bereich
der Vibrationen kann die Beschreibung durch ein Modell mit wenigen Moden
erfolgen.
Im Windkanal können die
aerodynamischen und aeroakustischen Eigenschaften von Objekten vermessen
werden. Bei Autos sollen hauptsächlich ein niedriger Luftwiderstand und
optimale Auftriebswerte erzielt werden. Bei Audi sind die folgenden
Schwerpunkte im Fokus: Kraftstoffverbrauch, Sicherheit, Fahrkomfort und
Umweltverträglichkeit, Thermomanagement und Klimatisierung - experimentelle
Überprüfung vorausgehender Berechnungen.

Abbildung. Im
Windkanal.
[http://www.technik-welten.de/automobil/wie-funktionierts/chassis-karosserie/eis-regen-und-schnee.html]
Luftwiderstand ist nicht nur
akustisch gesehen ein wichtiges Problem. Aufgabe des Motors ist die Wirkung
gegen Reibkräfte, und vor allem Luftwiderstand. Parametersind hier Luftdichte
(ρ), Oberfläche (A), Geschwindigkeit (v), Strömungswiderstandskoeffizient
(Cw):
Cw ist bei einer Platte ca. 1, bei einer
Kugel ca. 0,3-0,5, beim "Tropfenform" gegen 0,2-0,05.
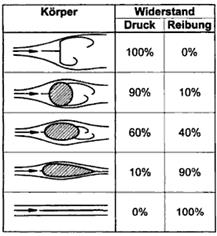
Abbildung.
Körperform beeinflusst Druck und Reibung.
[http://de.wikipedia.org/wiki/Str%C3%B6mungswiderstand]
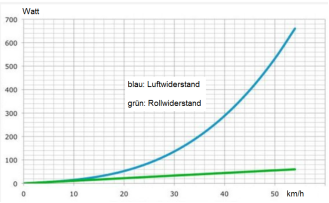
Abbildung.
Geschwindigkeit beeinflusst Roll- und Luftwiderstand unterschiedlich.
[http://de.wikipedia.org/wiki/Str%C3%B6mungswiderstand]
*****************************************************************************************************************************************
7. Schwingungen im Fahrzeug
7.1
Kundenerwartungen und Entwicklung
In den letzten Jahrzehnten sind
sowohl Kundenerwartungen als auch Entwicklungen exponentiell angestiegen. Das
betreibt ständige Entwicklung auf dem Gebiet der Fahrzeugakustik.
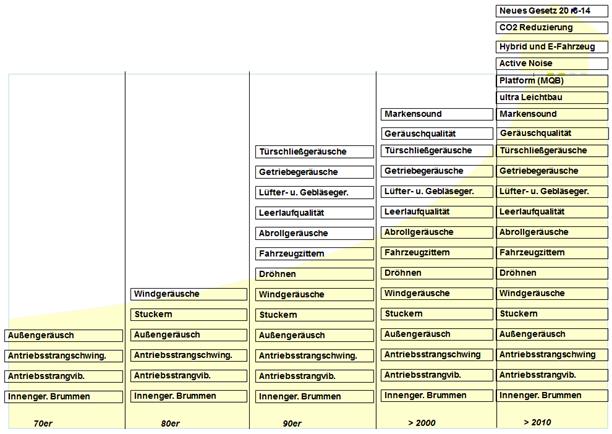
Abbildung.
Kundenerwartungen.
[AUDI]
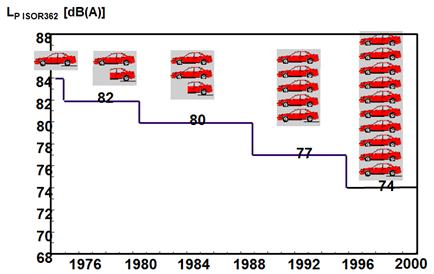
Abbildung.
Geräuschentwicklung.
[AUDI]
Bald wird es nicht nur eine obere
Grenze, sondern auch eine untere Grenze vorgeschrieben (wegen e-Antriebe, die
zu leise sind).
Die Aufgaben der Fahrzeugakustik
stellen oft Zielkonflikte dar (Komfort vs. Sportlichkeit und/oder Sicherheit).
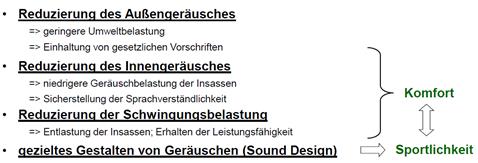
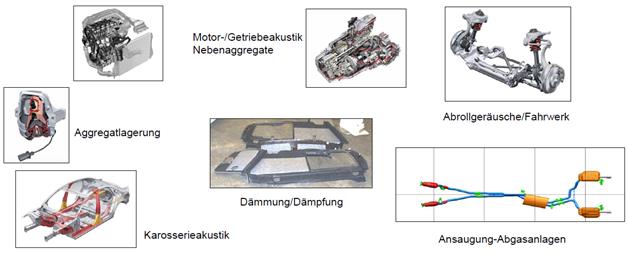
Abbildung.
Felder der Fahrzeugakustikentwicklung.
[AUDI]
7.2
Vibroakustische Fahrzeugeigenschaften
Über die Kontaktflächen des
Insassen zum Fahrzeug werden schwingende Oberflächen als Vibrationen empfunden
(Sitz, Lenkrad, Bodenbereich). Als Schwingungsquellen sind folgende vier
Bereiche wichtig:
- Antriebseinheit
aus Verbrennungsmotor und Nebenaggregaten,
- Interaktion
zwischen Fahrbahn und Rad,
- Aerodynamische
Umströmung (bei Bewegung),
- Mechatronische
Aktoren.
Vibrationen können ebenfalls als
Körperschall im Infraschallbereich angesehen werden,
die über die Kontaktstellen des Körpers taktil wahrgenommen werden. Die
Schwingungen im fühlbaren und hörbaren Frequenzbereich werden unter dem Begriff
"Vibroakustik" zusammengefasst. Vibroakustik umfasst "noise, vibration and harshness (NVH)".
7.3
Subjektive Beurteilung
Steigerung des Komforts ist oft
das Vermeiden oder Senken des Diskomforts. Subjektive
Bewertung des vibroakustischen Komforts kann zwei
Arten erfolgen:
- Indirekt,
wo die Auswirkungen des Diskomforts auf die
Konzentrationsfähigkeit des Probanden erfassen werden. Dazu werden den
Probanden Aufgaben gestellt und deren Lösung bewertet. Das erfordert hohen
Aufwand.
- Direkt,
wo der Beurteiler gezielt nach seiner Empfindung befragt wird. Nachteilig
ist, dass die Urteile nicht in einer vergleichbaren Form vorliegen.
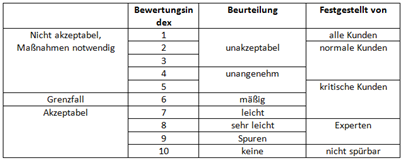
Abbildung.
Beurteilungsindex.
[P. Zeller – „Handbuch
Fahrzeugakustik“ Vieweg&Teubner Verlag, 2012.]
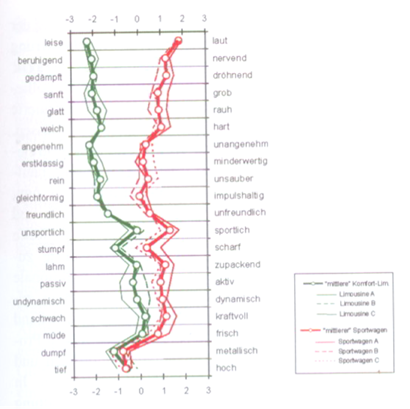
Abbildung.
Semantische Profile für das Innengeräusch in Limo und Sportwagen. Ein ähnliches
Diagramm kann auch kreisförmig dargestellt werden (so genannte "akustische
Spinne").
[P. Zeller –
„Handbuch Fahrzeugakustik“ Vieweg&Teubner Verlag,
2012.]
7.4 Fahrkomfort
Der subjektiv empfundene
Fahrkomfort (ganz besonders bei PKWs) spielt eine wichtige Rolle. Dazu zählt
man auch Schallemission und Schwingungseigenschaften. Komfortpunkte sind
- die
Kontaktfläche des Insassen zum Sitz,
- Fußaufstandsflächen
und
- der
Kontakt der Hand zum Lenkrad.
Hier müssen Schwankungspegel
niedrig sein.
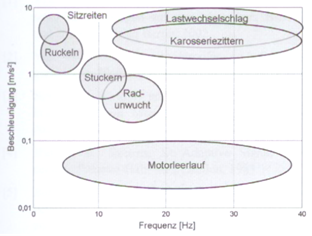
Abbildung.
Beschleunigung von Schwingungen im Auto.
[P. Zeller – „Handbuch Fahrzeugakustik“ Vieweg&Teubner
Verlag, 2012.]
Schwingungen können…
sowohl in den drei translatorischen Freihetsgraden
(x, y, z ; Längs-, Quer- und
Vertikaldynamik)
…als auch in den drei zugehörigen rotatorischen
Freihetsgraden
(Φ, ϑ, t; Nicken,
Wanken und Gieren) auftreten.
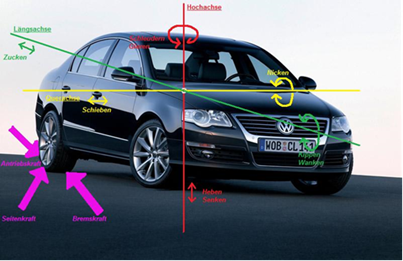
Abbildung.
Koordinaten.
[http://www.bonk-kfz.de/fahrzeugfederung/]
7.5 Modellbildung
Modellbildung heißt, die Realität
soweit aufgrund der Problemstellung zulässig zu vereinfachen, ohne die
interessierenden Sachverhalte unzulässig zu verfälschen.
- empirisches
(black-box) Modell:
- der
Aufbau des Systems noch unbekannt ist,
- hat
Eingänge und Ausgänge, aber das Innenleben ist unbekannt oder unwichtig,
- die
Reaktion des Systems kann mit verschiedenen Eingangssignalen getestet
werden,
- mit
einer großen Zahl lässt sich eine Hypothese über den Zusammenhang bilden.
- physikalisch
begründetes Modell (white-box):
- der
Zusammenhang zwischen Eingang und Ausgang aufgrund der Kenntnis von den
inneren Zusammenhängen des Systems analytisch herleiten.
- Beispiel
ist eine FEM-Analyse.
Ein gutes Beispiel ist das
"Zweispurmodell" eines Autos. Hier werden nur zwei Spuren in Betracht
gezogen.
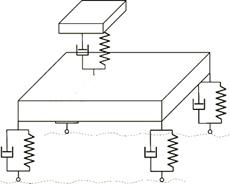
Abbildung.
Zweispurmodell eines Autos, 4 Räder und Sitz.
[AUDI]
Schwingungen sind oft in vier
Gruppen aufgeteilt:
- Bei
freien Schwingungen (Eigenschwingungen)
- wird
das System ausgehend von einem Anfangszustand sich selbst überlassen und
kommt nach einem Einschwingvorgang zur Ruhe.
- Das
System wird nach einer einmaligen Anregung sich selbst überlassen und
kommt durch die Dämpfung zur Ruhe (z.B. geschwindigkeitsproportionale
Reibung).
- Die
Frequenz wird durch die Systemparameter bestimmt.
- Beispiele
sind: Einmassenschwinger, ungeffester
Zweimassenschwinger, gekoppelte Systeme.
- Bei
erzwungenen Schwingungen
- schreiben
äußere Kräfte die Energiezufuhr und damit die Frequenz vor.
- Dem
System wird permanent Schwingungsenergie zugeführt, und wird die
Schwingung erhalten.
- Es
kann auch ein Einmassenschwinger oder Zweimassenschwinger sein.
- Selbsterregte
Schwingungen takten die notwendige Energiezufuhr
selbst.
- Die
Frequenz ist sowohl durch Systemparameter als auch durch die Anregung
bestimmt.
- Es
sind freie Schwingungen, welche nicht durch die Dämpfung abklingen,
sondern durch eine Quelle Energie zugeführt bekommen.
- Hier
bestimmt das System selbst die Frequenz der Energiezufuhr.
- Die
erste Gruppe solcher Schwingungen sind wo die Ursache in den tribologischen Parametern des Reibkontaktes haben
(Kupplungsrupfen, Kontaktstellengeräusche).
- In
der anderen Gruppe wird das Schwingungsverhalten durch die geometrischen
und dynamischen Eigenschaften des mechanischen Systems bestimmt (Bremsenquitschen).
- Bei
parametererregten Schwingungen
- sind
mehrere Koeffizienten in der Differentialgleichung nicht konstant, sondern
ändern sich periodisch.
- Die
Frequenz wird von außen gesteuert.
7.6 Fahrbahnerregte Schwingungen
Sie werden durch die Unebenheitensanregung der Räder beim Überfahren der
Fahrbahn angeregt.
-
Zweispurmodelle
sind erforderlich, um die von der Fahrbahnoberfläche ausgehenden Anregungen an
allen vier Rädern zu erfassen.
-
Bei
einem geradlinigen Fahrweg und korrelierter Anregung der zwei parallelen
Fahrspuren kann die Dynamik um die Längsachse (Wanken) vernachlässigt werden (Einspurmodell).
-
Vernachlässigt
man noch die Dynamik um die Querachse (Nicken), ist es ein Viertelmodell.
Für den fahrbahnerregten Schwingungskomfort
ist die Dynamik in Richtung "auf" (Vertikaldynamik mit einem Einspurmodell) relevant. Es muss immer der Zielkonflikt
zwischen Fahrkomfort und Fahrsicherheit/Fahrdynamik aufgelöst werden. Es werden
auch semi-aktive und vollaktive Fahrwerke eingesetzt um den Zielkonflikt zu
lösen. Ein weiteres Komfortkriterium ist das Systemverhalten beim Überfahren
von Fahrbahnstufen. Idealisiert kann man die Anregung im Zeitbereich als
Sprungfunktion betrachten. Harmonische, deterministische Unebenheitsanregungen
sind selten. Vielmehr geht es um mehr oder weniger zufällig verteilte
unregelmäßige Unebenheiten (stochastisches Modell). Der tieffrequente
Schwingungskomfort beim System Sitz-Mensch kann mit einem Viertelmodell
beschrieben werden.
- Hier
sind Frequenzen zwischen 1-4 Hz zu betrachten.
- Bei
ca. 3 Hz gibt es die eigentliche Sitzresonanz, und bei 7-8 Hz sind die
Körperresonanzen zu finden.
Karosseriezittern tritt vor allem bei
Fahrzeugen mit großer Dachöffnung (Cabrios) oder Hecköffnung (Kombi) auf. Beim Motorstuckern geht es um eine Koppelschwingung zwischen dem
elastische gelagerten Motor-Getriebe-Verband und dem Aufbau. Die Anregung
erfolgt durch symmetrische Fahrbahnunebenheiten auf beiden Spuren (auf der
Autobahn häufig). Hier sind Videos zu finden: http://www.youtube.com/watch?v=9A8dq0hzdLs,
http://www.youtube.com/watch?v=ED7iOqY-w7k
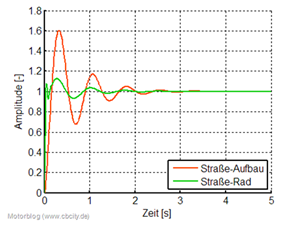
Abbildung. Schwingungen
in der Zeit und in der Frequenz.
[P. Zeller –
„Handbuch Fahrzeugakustik“ Vieweg&Teubner Verlag,
2012.]
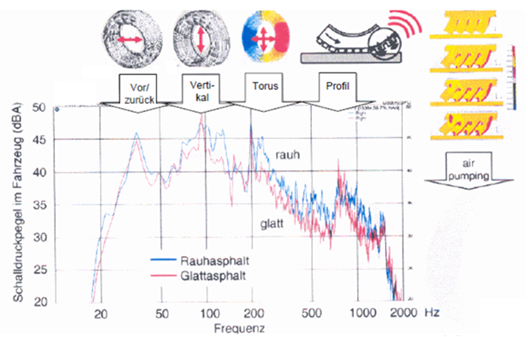
Abbildung.
Schwingungen beim Rad.
[AUDI]
7.7 Raderregte Schwingungen
Schwingungen, die infolge
mangelnder Gleichförmigkeit des Systems Rad/Reifen entstehen (insbesondere bei
höheren Geschwindigkeiten). Ursache dafür können sein: Unwucht,
Steifigkeitsschwankungen, Rundlauffehler. Hierher zählt man auch Anfahr- und
Bremsstempeln. Damit führt das Rad keine reine Vertikalschwingung sondern
bewegt sich auf einer elliptischen Bahnkurve (dabei spielt Reifenfülldruck eine
wichtige Rolle). Das Phänomen, das vor allem bei Eingelenkern
mit großem Federweg auftritt, ist das so genannte Bremsstempeln: http://www.youtube.com/watch?v=iIv8cKRyq3s
7.8 Motorerregte Schwingungen
Für motorerregte Schwingungen
sind Beispiele:
- Leerlaufschwingungen
des Motors,
- Start-Stop-Schwingungen,
- Reibschwingungen
bei schlupfender Kupplung und
- Lastwechselschwingungen.
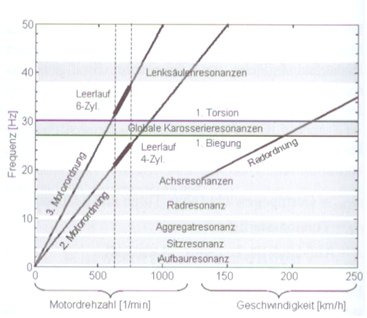
Abbildung.
Ordnungsanalyse (siehe später) von Resonanzen.
[P. Zeller –
„Handbuch Fahrzeugakustik“ Vieweg&Teubner Verlag,
2012.]
7.9 Karosserieschwingungen (Strukturdynamik)
Durch die Karosserie werden alle
Teilsysteme des Fahrzeugs miteinander gekoppelt. Das dynamische Verhalten der
Karosserie wird durch die Lage der globalen Eigenfrequenzen und durch die
Ausprägung der Schwingformen charakterisiert. Zu geringe statische
Karosseriesteifigkeiten beeinflussen die Fahrdynamik negativ, können zu
Klapper- und Knarzgeräusche führen und haben auch die
Folge, dass sich Türen, Klappen, nicht einwandfrei öffnen und schließen lassen.
Für Schwingungen, deren Frequenz über von 2 bis 4 Hz liegen, kann die
Karosserie nicht mehr als nur elastisch angesehen werden. Die globalen
Eigenformen sind für das Schwingungsverhalten und die lokalen Schwingformen für
die Körperschalleinleitung und Übertragung relevant. In der Entwicklung ist es
notwendig, die Auswirkungen verschiedener Zielsysteme von
Eigenfrequenzkonfigurationen der bestimmenden globalen Eigenformen auf den
Schwingungskomfort des Fahrzeuges darzustellen.
7.10 Schwingungsminderung
Es gibt drei verschiedene Arten
von Schwingungsminderung:
- Passive
Maßnahmen beeinflussen das Übertragungsverhalten des Transferpfades durch
Veränderungen von Bauteilparametern (ohne zusätzliche Energie).
- Semi-aktive
Maßnahmen beeinflussen die Übertragungsfunktionen der Transferpfade jedoch
abhängig vom Betriebszustand. Diese wird durch aktiv steuerbare oder
regelbare Elemente durchgeführt (mit Hilfe von Hilfsenergie).
- Bei
voll-aktiven Maßnahmen erfolgt die Beeinflussung über die Aufprägung von
zusätzlichen Kompensationskräften (mit erheblicher Energie).

Abbildung.
Schwingungsminderungsmethoden.
[P. Zeller –
„Handbuch Fahrzeugakustik“ Vieweg&Teubner Verlag,
2012.]
Bei passiven Maßnahmen sollen die
Anregungen sollten vor der Bekämpfung erledigt werden. Wenn nicht:
Resonanzfrequenzen sind zu verschieben um ungünstige Kombinationen zu
vermeiden. Die wichtigste passive Maßnahme ist
- die
Isolation (durch elastische Lagerung) und
- die
Tilgung von resonanzhaften Phänomenen durch
Applizieren eines abgestimmten zusätzlichen Schwingungssystems auf der zu
beruhigenden Masse.
Alle Methoden zeigen Wirkung nur
in bestimmten Frequenzbereichen. Außerhalb der Bereiche kann man sogar mit
einer Verstärkung rechnen.
Isolation
(Entkoppelung)
Die Schallquelle muss entweder
schwingungstechnisch von der Umgebung getrennt, oder der Empfänger von den
Schwingungen isoliert werden. Bei der einfach
elastischen Lagerung erfolgt die Trennung mittels EINER
zwischengeschalteten Lagerebene. Bei doppelt
elastischer Lagerung wird die Quelle durch eine Zwischenmasse und ZWEI
federnde Lagerelemente isoliert. Widersprüchliche Anforderungen sind zu
erfüllen:
- Ausreichende
Steifigkeit und damit kleine Federwege zum Tragen der statischen Last,
- hohe
Dämpfung von niederfrequenten Schwingungen um die Amplituden im
Resonanzfall zu begrenzen,
- Gute
Isolation von höherfrequenten akustischen
Einträgen und damit geringe Steifigkeit und niedrige Dämpfung.
Es werden Federelemente mit
Dämpferelementen kombiniert. Elastische Federelemente sind Stahlfedern oder
Luftfedern (linear). Schwingungsdämpfer sind nicht linear (hydraulischer
Teleskopdämpfer, Luftfederdämpfer).
Dämpfung
Dämpfung ist immer die Umwandlung
von kinetischer Energie in Wärmeenergie (Dissipation). Es gibt folgende
Varianten von Dämpfung:
- Materialdämpfung
auf mikroskopischer Ebene durch innere Reibung bzw. Plastizität eines
Festkörpers,
- Viskose
Dämpfung durch Scherkräfte auf mikroskopischer Ebene in Flüssigkeiten oder
Gasen,
- Reibungsdämpfung
auf makroskopischer Ebene durch Kräfte an der Grenzfläche zwischen
Reibpartnern,
- Abstrahldämpfung
bei schwingenden Oberflächen.
Dämmung heißt dass Schall
reflektiert wird und so nicht weitergeleitet.
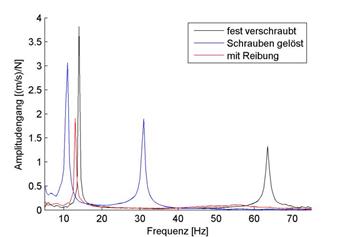
Abbildung.
Resonanzen bei Schwingungen mit und ohne Schrauben.
[P. Zeller –
„Handbuch Fahrzeugakustik“ Vieweg&Teubner Verlag,
2012.]
Tilgung
Tilgung ist die Kompensation der
Wirkung von translatorischen Erregerkräften oder rotatorischen
Erregermomenten durch entgegengesetzt gerichtete
Massenkräfte oder -momente. Bei passiven Tilgern wird
diese Gegenkraft durch ein Feder-Masse-System erzeugt. Bei aktiven Systemen
werden die Kräfte von aktiv angesteuerten Aktuatoren aufgebracht. Tilgung ist
die Beruhigung einer Teilstruktur eines Systems durch Umleitung der
Schwingungsenergie auf eine andere Teilstruktur. In der Umgebung der
Tilgungsfrequenz werden Amplituden erheblich reduziert, gleichzeitig aber zwei
neue Schwingmoden mit vergrößerten Amplituden entstehen.
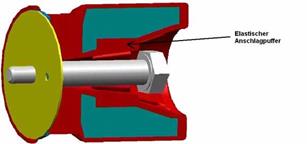

Abbildung.
Schwingungstilger mit elastischem Anschlagpuffer.
[http://www.contitech.de/pages/produkte/schwingungstechnik/antriebsstrang/schwingungstilger_de.html]
[http://www.wegu.de/OverloadProtectionVibrationAbsorbers.aspx]
7.11
Aktive Kompensation
Aktive Maßnahmen sind Teil der
"Akustik 2.0". Aktive Kompensation wurde erstmal zur Unterdrückung
von unerwünschtem Luftschall unternommen. Heute wird es auch für Körperschall
und Schwingungen eingesetzt. Das Prinzip beruht auf der Interferenz eines
unerwünschten Störsignals mit einem erzeugten Kompensationssignal, welches
geeignet ist, das Störsignal zu eliminieren. Beim Steuerungsansatz (Feed
Forward)
- wird
die Störgröße erfasst und
- daraus
ein Kompensationssignal abgeleitet.
Beim Regelungsansatz (Feedback)
- wird
das Kompensationssignal aus der
- rückgeführten
Regelgröße berechnet.
- Für
eine messbare Störgröße müssen Sensoren installiert werden.
- Hierher
zählt aktive Lagerung, AVC, ANC (siehe später), usw.
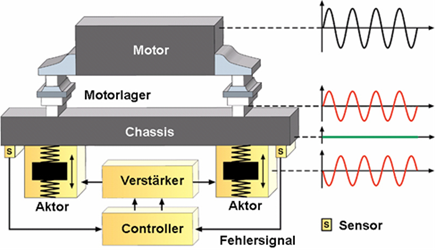
Abbildung. Active Vibration Control/Cancelling
(AVC).
[http://www.contitech-megi.de/pages/current/press/2008/080527_schwingung/presse_en.html
*************************************************************************************************
8. Geräusche und Geräuschminderung im Fahrzeug
8.1
Geräusche im Fahrzeug
Geräusche im Fahrzeug können
verschiedene Gründe haben. Sie können innen entstehen und nach außen
abgestrahlt werden (siehe rot in der Abbildung), oder umgekehrt (blau).
Vibrationen unter 30 Hz können sowohl als Vibration und manchmal auch als
sekundärer Luftschall wahrgenommen werden.
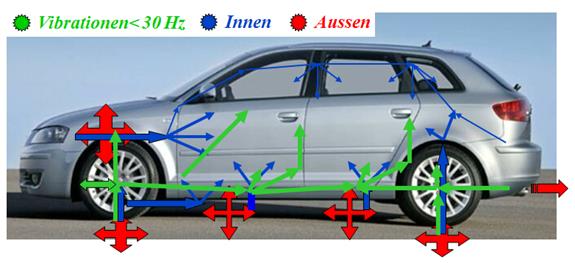
Abbildung.
Geräusche im und um das Fahrzeug.
[AUDI]
Die folgenden Gebiete sind für
die Geräuschaufteilung wichtig:
- Ladungswechselgeräusch
- Reifen-Fahrbahngeräusch
- Stör-
und Betätigungsgeräusch
- Türbetätigungsgeräusch
- Audio
(Autohifi)
8.2
Ladungswechselgeräusch
Es umfängt vom Ansaug- und Abgassystem
abgestrahlten Geräuschanteilen. Sie können durch periodische Arbeitsprozesse
verursacht werden oder durch kontinuierlichen turbulenten Durchströmung der
Luft und Gas führenden Bauteile. Das Strömungsgeräusch ist bei niedrigen
Drehzahlen und hoher Last von Bedeutung. Bei höheren Drehzahlen dominieren
immer mehr die mechanischen Geräusche. Das Ansaugsystem's
Aufgabe ist Frischluft für die Verbrennung zu führen. Der Luftfilter dient auch
zur Geräuschdämpfung (Dieselmotor mehr problematisch). Die Abgasanlage ist für
Abführung und Reinigung der heißen Abgase, Dämpfung des Abgasgeräusches (und
Sound Design) da. Es ist auch möglich "Lautsprecher" in das
Abgassystem zu installieren, wie z.B. das System "Sound Actor" von Audi, welches es ermöglicht den sportlichen
Charakter des Autos zu erhöhen (ein V6 Motor kann wie ein V8 klingen). Die
akustische Auslegung ist schwierig da hier Zielkonflikte vorliegen.
8.3
Reifen-Fahrbahngeräusch
Reifen stehen für die Sicherheit.
Breitere Reifen sind besser, aber strahlen mehr Schall ab. Luftreifen
reduzieren das Rollgeräusch sehr viel. Reifenprofil und Laufstreifenmischung
sind hier sehr wichtig. Reduzierung des Rollgeräusches heißt die Abstrahlung
der Strukturschwingungen des Reifens zu vermindern. Reifenhersteller verwenden
unterschiedlich lange Blöcke am Reifen um eine tonale Anregung zu vermeiden und
um die Schallenergie zu verteilen. Beim rollenden Reifen ist im Bereich der
Bodenaufstandsfläche eine Kompression der Luft in den Profilrillen zu erwarten
(AirPumping). Je glatter und dichter die
Fahrbahnoberfläche ist, desto größer ist die Möglichkeit zum Lufteinschluss
(Zischgeräusch). Hier spielt auch die Fahrbahntextur eine wichtige Rolle. Das
Rollgeräusch muss nicht nur im Fahrzeug sondern auch außerhalb des Fahrzeugs
untersucht werden.
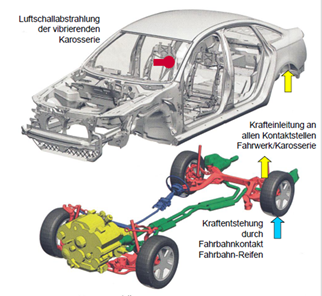
Abbildung.
Karosserie als leitendes Element für Vibrationen.
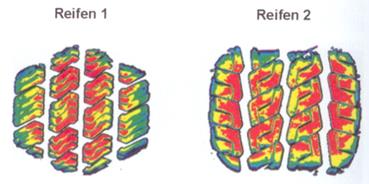
Abbildung: Reifen 1: geräuschempfindliche Reifenmitte, Reifen 2: optimale
Verteilung.
[P. Zeller –
„Handbuch Fahrzeugakustik“ Vieweg&Teubner Verlag,
2012.]
8.4
Stör- und Betätigungsgeräusch
Fahrgeräusche verursachte
Geräuschpegel im Innenraum werden geringer so treten Nebengeräusche verstärkt
auf. Wird ein Geräusch einmal wahrgenommen, so bleibt es im Vordergrund. Auftretenshäufigkeit, Intensität, Lokalisierbarkeit sind
wichtig und werden sehr subjektive beurteilt.
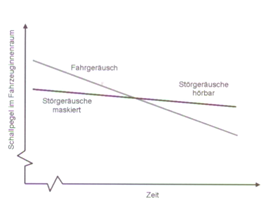
Abbildung.
Als Fahrgeräusch immer niedriger wird im Fahrzeug, werden vorher maskierte
Geräusche hörbar.
[P. Zeller –
„Handbuch Fahrzeugakustik“ Vieweg&Teubner Verlag,
2012.]
- Mechatronische
Geräusche werden durch Systeme verursacht, wo ein mechanisches Hauptsystem
arbeitet. Hier werden elektrische Sensoren verwendet, welche auf
mechanische (hydraulische) Systeme wirken.
- Elektrische
Stellmotoren, Lüfter und Gebläse, Klimaanlage, Lenkungssystem, Bremssystem
usw.
- Kontaktstellengeräusche
aufgrund von Relativbewegungen von Bauteilen werden als Störgeräusche sehr
unangenehm wahrgenommen. Solche Geräusche sind instationär
und treten zufällig auf. Eine subjektive Beurteilung ist oft genügend.
Lange Impulse reduzieren den Frequenzbereich, erhöhen aber die Amplituden.
- Klapper-,
Knarz- und Quitschgeräusche.
- Zufällige
und kontinuierliche Störgeräusche, welche nicht einzelnen Ereignissen
zugeordnet werden können, sind noch lästiger. Die Ursache ist nicht immer
bekannt und kann auch nicht beeinflusst werden. Die Ursache dafür sind
stationäre Schwingungen im Fahrzeug, durch unebenen Straßenbelag oder
durch Audiobeschallung erregt.
8.5
Türbetätigungsgeräusch
Das Geräusch beim Öffnen und
Schließen der Türe ist ein wichtiges Erlebnis aus der man oft Rückschlüsse auf
die Qualität des gesamten Fahrzeuges zieht. Öffnungsgeräusche werden von 50-54
dB(A) und Schließgeräusche von 58-62 dB(A) als richtig eingestuft.
Anstrebenswert ist auch ein eher dunkles Klangbild ohne Klicken. Der größte
Teil des Geräusches entsteht im Schloss (Körperschall), Tür und Karosserie
werden schwingen und indirekter Luftschall wird abgestrahlt.
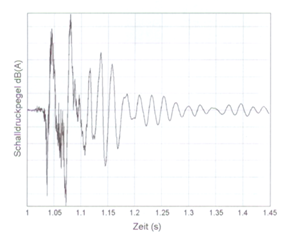
Abbildung.
Zeitablauf eines Türbetätigungsgeräusches.
[P. Zeller –
„Handbuch Fahrzeugakustik“ Vieweg&Teubner Verlag,
2012.]
8.6
Audio
Die Wiedergabequalität von Audioquellen
stellt immer einen Beanstandungspunkt dar. Insbesondere die Wechselwirkung der
Lautsprecher mit den umgebenden Interieur-Teilen ist kritisch. So kann der
Lautsprecher nicht nur die Membran sondern auch das Verkleidungsteil bewegen.
Dies führt zu einem akustischen Kurzschluss und Verzerrungen. Eine weitere
Frage ist die Anzahl (Kanäle) der Lautsprecher.

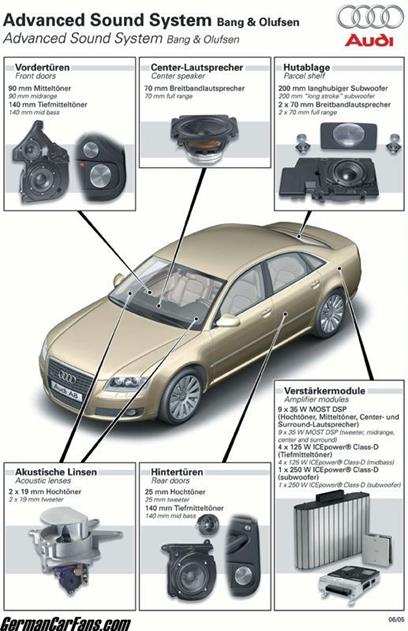
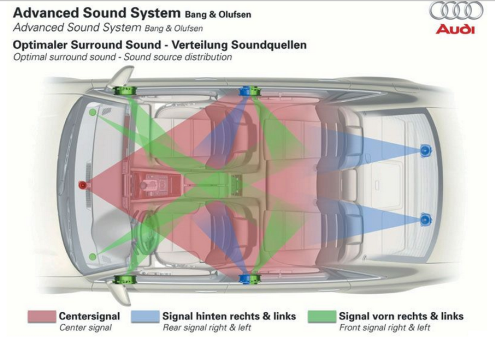
Abbildung.
B&O Sound System bei Audi.
[AUDI]
[http://fourtitude.com/news/Audi_News_1/the-audi-a8-bang-and-olufsen-advanced-sound-system-in-depth/]
8.7 ANC
- Active
Noise Control / Cancellation
Unter Antischall (auch
"aktive Lärmkompensation", englisch Active
Noise Reduction [ANR] oder Active
Noise Cancellation [ANC]) versteht man
umgangssprachlich Schall, der künstlich erzeugt wird, um mittels destruktiver
Interferenz Schall auszulöschen. Dazu wird die Erzeugung eines Signals
angestrebt, das dem des störenden Schalls mit entgegengesetzter Polarität exakt
entspricht. Mit ANC im Fahrzeug kann man drehzahlabhängige Motorgeräusche
auslöschen, wenn Mikrofone im Motorraum platziert sind.
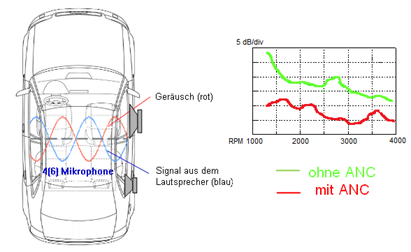
Abbildung.
ANC kann durch destruktive Interferenz Geräuschpegel bis zu 15-20 dB
reduzieren.
[AUDI]
Weitere interessante B&O Demo
Videos sind hier zu finden: http://www.youtube.com/watch?v=eAnF2YDZAA0,
http://www.youtube.com/watch?v=iZervJ3sZv0,
http://www.youtube.com/watch?v=2mwFyUNV0x4
Der "Sound Actor" von Audi ist ein System u Motorgeräusche im Inneren zu erhöhen. Es besteht aus einem vibrierenden Teil welcher sie Frontscheibe als Membran bewegt je nachdem wie der Fahrer das wünscht. Es kann auch einen Teil in der Abgasanlage haben. Beide werden aktiv über CAN-BUS kontrolliert.
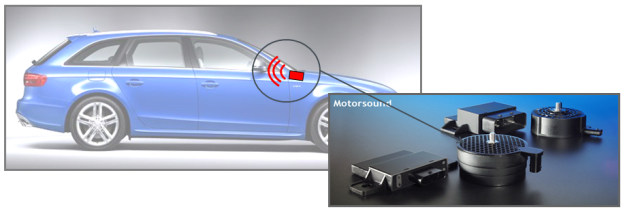
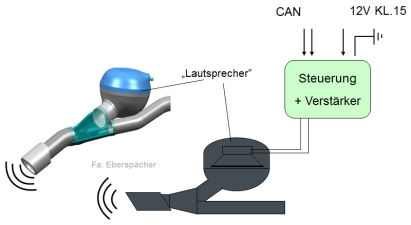
Abbildung.
Sound Actor bei Audi.
[AUDI]
8.8 Audi
Sound Videos
Um noch mehr Aufgaben und Gebiete
der Akustik zu erforschen, sind folgende "Audi TV" Videos zu
empfehlen:
https://www.youtube.com/watch?v=R63Ybfk84rs
https://www.youtube.com/watch?v=QsD7RH0iDxQ
https://www.youtube.com/watch?v=E6w2alhbIZc
***********************************************************************************************************************************
9. Grundlagen numerischer Methoden
9.1
Hintergrund
Hier werden die Grundlagen und
der mathematischer Hintergrund für die numerischen Methoden eingeführt. Dieses
erfordert die Kenntnisse in Differentialberechnungen. Um die numerischen
Methoden und Anwendungen kennenzulernen, kann dieser Kapitel übersprungen
werden.
Wie schon gesehen, ist Schall
kleine und schnelle Veränderung des Luftdrucks um den Mittelwert. Mittelwert
ist 105 Pa (Atm),
die Veränderungen etwa 10-5 - 102. Für die Berechnungen
brauchen wie die akustischen Variablen: Druck (p), Teilchengeschwindigkeit (v0),
Dichte (ρ), Temperatur (T). Ausbreitungsgeschwindigkeit
(Schallgeschwindigkeit) ist im Medium konstant (c=340 m/s ≠ v0).
Teilchengeschwindigkeit ist kleiner als c.
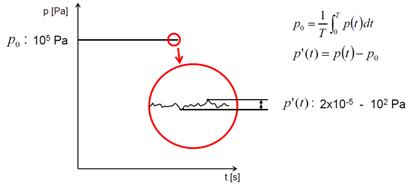
Abbildung. Schall
ist kleine und schnelle Veränderung des Luftdrucks um den Mittelwert.
[AUDI]
9.2
Akustische Variabel
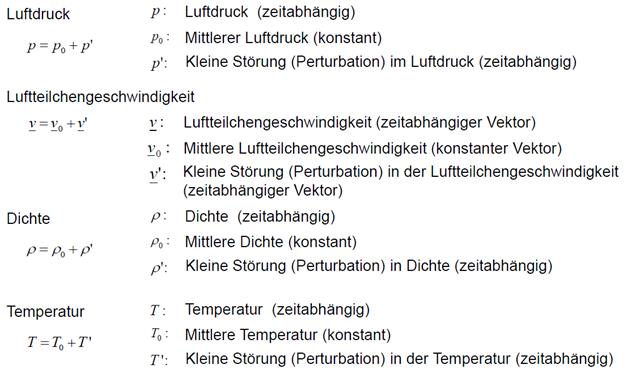
Um die Berechnungen zu machen
brauchen wir die folgenden Voraussetzungen:
- Luft
ist ein Kontinuum: homogen, ohne Dämpfung.
- Die
thermischen Veränderungen sind reversibel und adiabatisch.
- Nur
kleine Amplituden kommen vor.
- Das
Medium bewegt sich nicht, nur der Schwingungszustand breitet sich vor (v0=0).
9.3
Mathematisches Modell
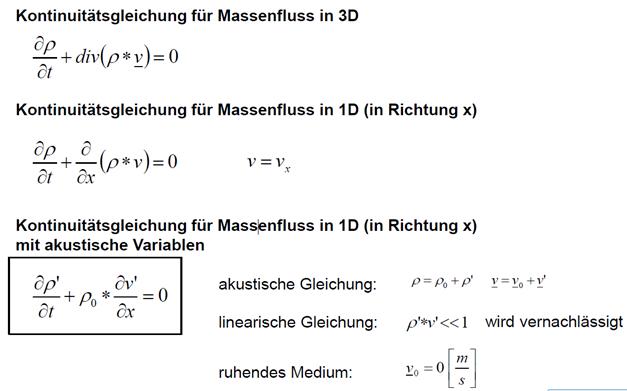
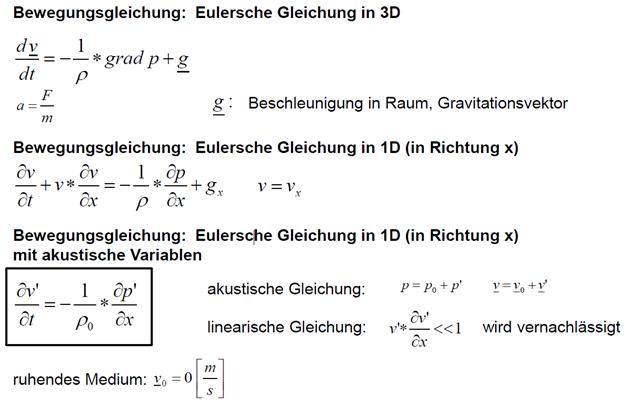
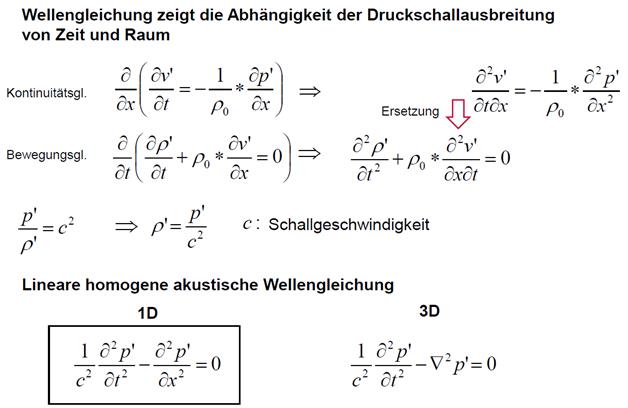
Die Interpretation ist wie
folgend. Es gibt Veränderungen
- als
Funktion des Ortes in einem Zeitpunkt,
- als
Funktion der Zeit an einem Ort,
- und
diese sind proportional (c2),
- wobei
λ=c/f.
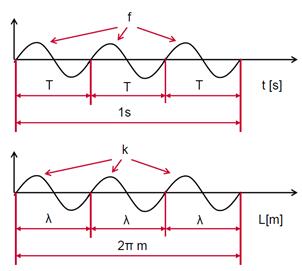
Abbildung.
Interpretation der Wellengleichung: es gibt die selben Veränderungen als Funktion des Ortes in
einem Zeitpunkt und als Funktion der Zeit an einem Ort.
[http://www.acs.psu.edu/drussell/demos.html]
9.4 Die
Wellengleichung
Die Wellengleichung beschreibt
dass die die Beschleunigung eines kleinen Abschnitts einer schwingenden Saite
ist der mittleren Auslenkung benachbarter Abschnitte proportional. Die Saiten
(oder andere physikalische Systeme in denen wellen auftreten) bewegen sich wellenförmig.
Eine Saite ist ein einfaches Beispiel: 1D Bewegung in einer Ebene. Es ist eine
"unendlich dünne" Linie, und die Lösung des Problems ist relativ
einfach. Eine Saite ist ein Kontinuum, eine Line aus unendlich vielen Punkten.
Ein Modell kann sie beschreiben als sehr viele dicht gepackte Massenpunkte, die
mechanisch durch "Federn" verbunden sind.
Das Hooke'sche
Gesetz sagt: Die Längenänderung einer (mechanischen) Feder ist der Kraft, die
auf sie ausgeübt wird, proportional. Eine schwingende Saite hat zu jedem
Zeitpunkt die Form einer Sinuskurve (im Raum). Außerdem, die Auslenkung der
Schwingung folgt ebenfalls einer Sinuskurve (in der Zeit). Die Saite auf und
abschwingend dieselbe Bewegung fortwährend wiederholt. Die Periode - die Zeit
zwischen Wiederholungen - ist 2π/c. Die Situation kann auch mit den Moden
beschreiben lassen, wobei gleichzeitig mehrere Sinuswellen (Moden) auf der
Saite schwingen. Die Auslenkung ist mit einem zeitabhängigen Faktor - der sich
ebenfalls sinusförmig sich ändert - multipliziert. In allen Fällen sind die
Enden der Saite fix (fest eingespannt). Je mehr Wellenberge und Wellentäler
(Knoten), desto schneller die Schwingung.
Die Wellengleichung enthält den
Begriff "partielle Ableitung". Wenn eine Funktion (u ist jetzt die
Amplitude, die Auslenkung) nicht nur vom Ort x sondern auch von der Zeit t
abhängt, kann man die Ableitung nach der Zeit und/oder nach dem Ort ausrechnen.
Zu jedem Zeitpunkt kann man du/dx ausrechnen. Das ist der Anstieg der Welle an
diesem Ort und zu dieser Zeit. Man kann auch den Ort festhalten und du/dt ausrechnen, welche dann die Geschwindigkeit ist. Die
kleine Veränderung du in den beiden Fällen kann und ist oft unterschiedlich.
Dafür ist das Symbol ∂ da um es zu zeigen, dass es hier um Veränderungen
hinsichtlich verschiedener Variablen geht.
Die Kurvenform der Saite hängt
vom Ort und von der Zeit ab. Newton's Gesetz (f=ma) sagt dass die Beschleunigung (die zweite Ableitung nach
der Zeit) eines kleinen Segments zu der Kraft proportional ist. Die Kraft kommt
von Nachbarsegmenten ausgeübt, und Nachbar bedeutet hier eine kleine
Veränderung im Ort. Die Wellengleichung sieht am Ende so aus:
![]()
Hier ist u(x,t) die senkrechte Position (Auslenkung) am Ort x zur
Zeit t, und c ist Ausbreitungsgeschwindigkeit. Es ist eine lineare partielle
Differentialgleichung. Links steht Beschleunigung, während die zweite Ableitung
nach dem Ort entspricht der Kraft. Da alle Störungen als klein angenommen
werden, kann die Linearität erhalten bleiben und so lässt sich die Gleichung
relativ einfach zu lösen. Die Kraft auf ein Stück Saite kann durch eine lineare
Kombination kleiner Auslenkungen der Nachbarelemente genähert werden. Jede
Lösung ist eine Überlagerung (Superposition) von zwei Wellen: eine die sich nach
links, und eine die sich nach rechts wandert. Die stehenden Wellen sind eine
Kombination von gleich geformten Wellen. Wenn es um 3D Lösungen geht, sieht die
Gleichung so aus:

Die Laplace'sche Verschiebung
stellt die mittlere Auslenkungsdifferenz zwischen u am untersuchten Ort und
seinem Wert an Nachbarorten dar. In zwei Dimensionen lassen wir z weg, und
Lösungen können ebene Formen sein. Die einfachsten Schwingungsmuster sind die
Eigenmoden. Alle Wellen kann man durch Überlagerung von Eigenmoden erzeugen.
Die Frequenzen der Eigenmoden stellen die natürlichen Schwingungsfrequenzen
dar. Bei rechteckigen Bereichen sind diese trigonometrischen Funktionen, bei
einem Kreis jedoch Bessel-Funktionen. Im Falle eines beweglichen Mediums muss
die Navier-Stokes-Gleichung angewendet werden.
***********************************************************************************************************************
10. Numerische Methoden
10.1
Freiheitsgrade
Die folgenden Methoden werden
später näher angegangen: MKS, SEA, FEM, BEM, PML, AML, CFD, TMM und Ray-Tracing
Mit Freiheitsgrad (Degrees-of-freedom, DOF) wird die Zahl der voneinander
unabhängigen (und in diesem Sinne "frei wählbaren")
Bewegungsmöglichkeiten eines Systems bezeichnet. Ein starrer Körper im Raum hat
demnach den Freiheitsgrad 6, denn man kann den Körper in drei voneinander
unabhängige Richtungen bewegen und in drei voneinander unabhängigen Ebenen
drehen. Ein starrer Körper ohne Bindungen hat demnach drei
Translationsfreiheitsgrade und drei Rotationsfreiheitsgrade. Ein elastisches
Kontinuum, z.B. Luft hat unendliche DOF. In FEM (siehe später) ist N die Anzahl
der Knoten. Da jede Knote 6 DOF hat, und ein Modell der Karosserie kann bis zu
N=1,5 Millionen Knoten haben ist die Gesamtzahl etwa DOF=9 Millionen! Wenn ein
Knoten gleichzeitig mechanisch und akustisch sind ist DOF=7.
Es ist immer wichtig, dass im
Falle von kleinen Auslenkungen und kleinen Druckveränderungen betrachten wir
das System linear, wo Ausgang entsteht durch lineare Kombination. Eine
Schwingung kann als lineare Kombination von Moden hergestellt werden.
Schwingung
ohne Dämpfung
Eine Masse und ein Feder bildet
ein Feder-Masse-System, wo die Eigenfrequenz ist:
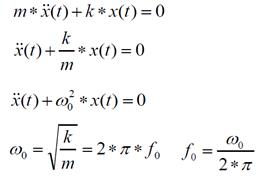
Abbildung.
Schwingung ohne Dämpfung.
[http://www.acs.psu.edu/drussell/demos.html]
Ein solches System hat eine
Resonanz. Über der Resonanz fällt die Übertragung unter 1. Wenn Dämpfung zu
groß ist: kann keine Schwingung entstehen. Wenn Masse grösser wird, die
Frequenz fällt.
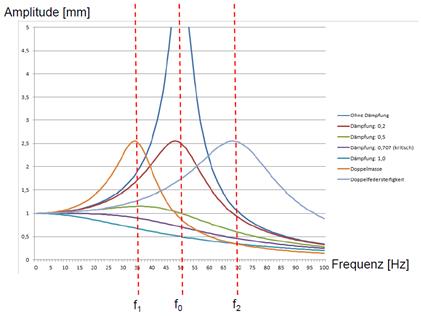
Abbildung. Verschiedene
Resonanzkurven.
[http://de.wikipedia.org/wiki/Resonanz]
[https://lp.uni-goettingen.de/get/text/4951]
Schwingung
mit Dämpfung (ohne Anregung)
Reale Schwingungen kommen mit Dämpfung
vor. Ohne Anregung fällt die Amplitude exponentiell ab. Dämpfung ist mit der
Geschwindigkeit proportional
Abbildung.
Schwingung mit Dämpfung.
[http://www.acs.psu.edu/drussell/demos.html]
Schwingung
mit Dämpfung (mit Anregung)
Die folgende Abbildung zeigt ein
reales System mit Dämpfung und Anregung bei 0.4 Hz (unter Resonanz), bei 1 Hz
(Resonanz), und bei 1.6 Hz (über Resonanz).
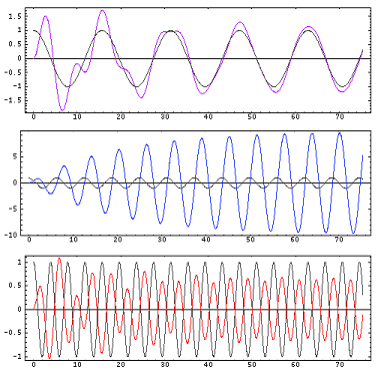
Abbildung.
Schwingung mit Dämpfung und Anregung.
[http://www.acs.psu.edu/drussell/demos.html]
10.2 FEM
(Finite Element Method)
Die Finite-Elemente-Methode (FEM)
ist ein Verfahren zur Lösung von partiellen Differentialgleichungen, wie. z.B.
die akustische Wellengleichung. Sie ist ein weit verbreitetes modernes
Berechnungsverfahren und ist das Standardwerkzeug bei der Festkörpersimulation.
Das Verfahren liefert eine Näherungsfunktion an die exakte Lösung der
Differentialgleichung. Zunächst wird das Berechnungsgebiet in eine beliebig
große Anzahl von Elementen unterteilt. Diese Elemente sind "endlich"
(finit) und nicht unendlich (infinit) klein. Das Aufteilen des Gebiets in eine
bestimmte Anzahl Elemente finiter Größe, die sich mit einer endlichen Zahl von
Parametern beschreiben lassen, gab der Methode den Namen
"Finite-Elemente-Methode". Aus CAD Programmen kann man FE-Modelle von
Karosserie, Interieur, Achsen usw. mit Millionen von Elementen herstellen. Eine
Analyse ist bis zu mehreren 100 Hz möglich, aber z.B.
Fahrgeräusch quantitativ zu prognostizieren ist nicht möglich. Für Körperschall
sind modale Gleichungen und die Modalanalyse erforderlich.
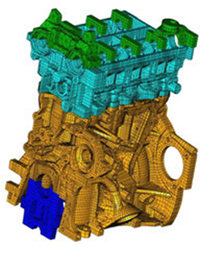
Abbildung.
FEM eines Motors.
[http://www.ecs.steyr.com/Finite-Elemente-Analyse.3153.0.html
]
10.3 BEM
(Boundary
Element Method)
Die Randelementmethode (REM,
englisch boundary element method, BEM,) ist ein ähnliches Diskretisierungsverfahren
zur Berechnung von partiellen Differentialgleichungen und ein numerisches
Berechnungsverfahren in den Ingenieurwissenschaften. BEM hat sich etwa parallel
mit der Finite-Elemente-Methode (FEM) entwickelt. Bei den meisten
Fragestellungen ist jedoch die FEM weiter verbreitet, weil sie weniger Restriktionen
bezüglich der Eigenschaften des zu beschreibenden Gebietes aufweist. Bei der
Randelementmethode wird, im Gegensatz zur FEM, nur der Rand bzw. die Oberfläche
eines Gebietes oder einer Struktur diskretisiert
betrachtet, nicht jedoch deren Fläche bzw. Volumen. Die unbekannten
Zustandsgrößen befinden sich nur auf dem Rand. Da im Rahmen der Diskretisierung des Problems wird nicht der ganze
Betrachtungsraum sondern nur die Oberfläche modelliert, kann das 3D Problem auf
ein 2D Problem reduziert werden. http://www.youtube.com/watch?v=6K97dH8AK8o
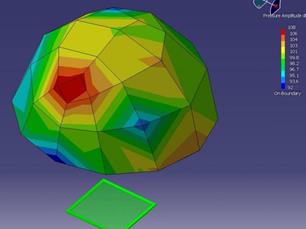
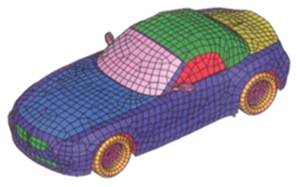
Abbildung.
BEM eines Lautsprechers und ein Fahrzeugs.
[http://www.bastra.com/calculation-service/bem/]
[P. Zeller – „Handbuch Fahrzeugakustik“ Vieweg&Teubner
Verlag, 2012.]
Problem ist beim FEM, dass es
Reflexionen an der Netzgrenze gibt, so werden die Ergebnisse gefälscht. Ein
Mikrofon kann nur innerhalb des Netzes sein, und das Netz kann zu groß werden,
Man kann auch FEM+BEM zusammen verwenden und das Mikrofon kann innerhalb oder
außerhalb sein (PML, AML). Es gibt auch eine iFEM
Methode, z.B., unter MATLAB, wo das Netz ist in einer Richtung unendlich ist.
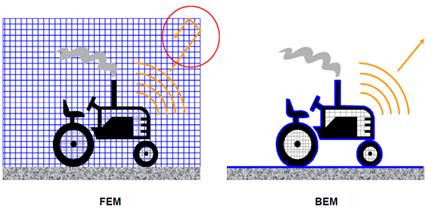
Abbildung.
Vergleich FEM und BEM.
[AUDI]
10.4 MKS (Mehrkörpersimulation)
MKS ist eine Methode der numerischen
Simulation, bei der reale Mehrkörpersysteme durch mehrere unverformbare
Körper abgebildet werden. Es ist für niederfrequente Übertragung gedacht für
nichtlineare Schwingungsanalyse im Zeitbereich. Die Bewegungsfähigkeit der
Körper zueinander wird durch idealisierte kinematische Gelenke eingeschränkt.
Ein Mehrkörpersystem besteht aus Starrkörpern, die durch Gelenke geometrisch,
oder durch Feder-Dämpfelemente über Kräfte miteinander gekoppelt sind. Dabei
spielt der Schwerpunkt eine wichtige Rolle. MKS Systeme stellen aus dem
definierten Modell und den Zwangsbedingungen das Gleichungssystem auf und
berechnen das kinematische und dynamische Systemverhalten im Zeitbereich (z.B.
Fahrwerkanalyse, Hydrauliksystem) und es können auch nichtlineare Anteile verwendet
werden. Die Integration einer FE-Analyse in das MKS-Modell ermöglicht eine
Berechnung der Bauteilbelastungen während der Bewegung.
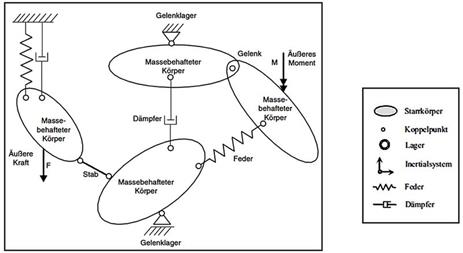
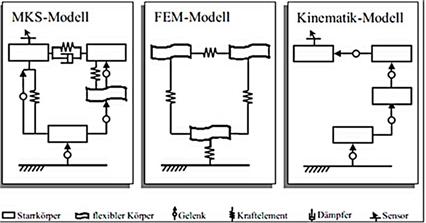
Abbildung.
MKS Modell.
[https://wiki.zimt.uni-siegen.de/fertigungsautomatisierung/index.php/Methodiken_zur_Simulationsmodellierung_von_kinematischen_Fertigungsmaschinen_-_Teil_A]
10.5 SEA - Statistische Energieanalyse
Bei räumlich ausgedehnten
Strukturen und höheren Frequenzen ist die Annahme starrer Körper nicht mehr
zulässig, und so verwendet man FEM. Durch statistische Mittelung über die
vielen Eigenschwingformen kann das Problem vereinfacht werden. MKS und FEM
Methoden überlappen und sind ca. bis 200 Hz nutzbar, SEA erst über 500 Hz. Es
ist geeignet zur Bestimmung der dynamischen Eigenschaften von komplexen,
zusammengesetzten Strukturen. Berechnet werden die mittleren Schwingungspegel
der einzelnen Teile und der von der Struktur abgestrahlte Schall. Die
Behandlung des Schwing- bzw. Körperschallverhaltens und des
Schallabstrahlverhaltens ist im modalen Bereich sehr aufwendig oder gar
unmöglich. Es entstehen nach aufwendiger Rechnung große Ergebnisdatenmengen,
die dann wieder auf die eigentlich gewünschten integralen Größen, wie z.B.
mittlerer Schalldruckpegel in der Umgebung der Maschine reduziert werden
müssen.
Bei tiefen Frequenzen ist
Modendichte klein, und globale Moden können bestimmt werden. Bei hohen
Frequenzen ist Modendichte groß, die Moden überlappen so ist SEA anwendbar.
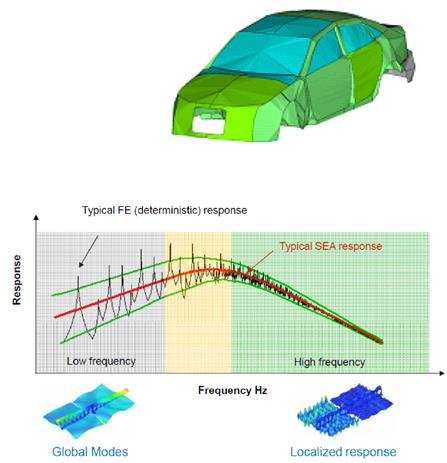
Abbildung.
Bei hohen Frequenzen ist Modendichte groß, die Moden überlappen so ist SEA
anwendbar.
[AUDI]
Die SEA ist also ein
statistisches Berechnungsverfahren, bei dem mit Erwartungswerten der
gespeicherten Energien und ausgetauschten Leistungen zwischen gekoppelten
Systemen gerechnet wird. Statt exakter Berechnung wird eine gewisse
statistische Sicherheit erreicht. Es wird über einen großen Frequenzbereich
(Oktav, Terz) gemittelt. In diesem Bereich muss eine Mindestanzahl von
Resonanzen liegen (z.B. 6 Moden pro Frequenzband). In der Praxis: nutzbarer
Bereich oberhalb 500 Hz.
10.6 PML - Perfectly
Matched Layer
PML ist eine numerische Methode
für die Simulation der Wellenausbreitung in grenzloser Umgebung (in der
Zeitdomäne für FEM). FEM ist generell für interne Probleme benutzt, jetzt kann
es für äußere Probleme mit der PML-Schicht ergänzt werden. Das Perfectly Matched Layer
(PML) ist eine willkürliche, absorbende Schicht
für die Wellengleichung. Die wichtigste Eigenschaft ist: wenn Wellen aus einer
nicht-PML Schicht auf die absorbende PML Schicht
fällt, werden sie nicht reflektiert. So werden keine Wellen ins Interior reflektiert (welche die Kalkulationen dort
einfacher machen können).
Das AML - Automatically
Matched Layer ist die automatische Modellierung
für die absorbende FEM-Schicht (die PML-Schicht). Es
ist das "next generation
PML" für Geräuschausstrahlungssimulation. Eine absorbierende Schicht kann
simuliert werden (nicht physikalisch durch ein FEM-Netz, sondern es wird auf
der Lösungsebene benutzt). Es kann angewendet werden für äußere Strahlung für
Motoren oder Kompressoren, für Simulation für Maschinen. Es ist effektiv da
weniger Elemente für akustische Probleme nötig seien können (http://www.lmsintl.com/automatically-matched-layer).
Die zwei Schritte für äußere Simulation in FEM sind:
- Die
Lösung wird in der FEM Domäne mit einer PML Schicht bestimmt (Absorption).
Wellen breiten in der FEM-Schicht aus, und werden in der PML absorbiert.
- Die
zweite Berechnung bestimmt den Druck außerhalb der FEM Domäne.
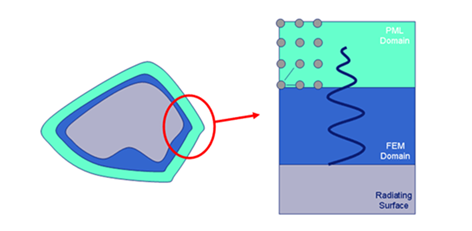
Abbildung.
Die Schichten einer strahlenden Struktur. Die abgestrahlten Wellen sind
gradweise in der PML-Schicht absorbiert um reflektierten Wellen in der
FEM-Domäne zu vermeiden (Freifeld Simulation).
[http://www.engineering.com/DesignSoftware/DesignSoftwareArticles/ArticleID/7230/Actran-for-Acoustic-Radiation-Designs.aspx]
10.7 CFD - Computational Fluid Dynamics
Die numerische Strömungssimulation
(CFD) dient in der Produktentwicklung zur Vorhersage der strömungstechnischen
Eigenschaften von Bauteilen. Der Einsatz von CFD gestattet es, komplexe
Strömungsprobleme in einer frühen Entwicklungsphase zu untersuchen.
Simulationen in der Aerodynamik liefern Aussagen über Wechseldrücke auf den
Oberflächen und Fluktuationen in der Umströmung, die signifikante akustische
Quellen sein können. Im Automobilbau für Fahrzeugklimatisierung, Motorkühlung,
Fahrzeug-Umströmung, Fahrzeug-Durchströmung anwendbar. Es können die
strömungstechnischen Eigenschaften von Fluiden, also Gas und Flüssigkeiten
unter Randbedingungen ermittelt werden. Ergebnisse der CFD Strömungssimulation
sind z.B.: Geschwindigkeiten, Strömungsprofile, Druck und Druckverläufe usw. (http://www.youtube.com/watch?v=OeCVFYMcS0E,
http://www.youtube.com/watch?v=LXw5OvIP9zM).
10.8 TMM - Transfer-Matrix Method
Das TMM kann anwendbar sein, wenn
das ganze System als eine Kette von Subsystemen repräsentiert werden kann (Netz
von Subsystemen). Diese Subsysteme sind nur mit den benachbarten Subsystemen in
Verbindung. Die Subsysteme sind mit einander durch die Transfer-Matrices
geknüpft. Die Matrices können analytisch, experimentell oder numerisch
hergestellt werden (COMSOL Modul).
10.9 Raytracing
Raytracing (Strahlverfolgung) ist ein auf der
Aussendung von Strahlen basierender Algorithmus zur Verdeckungsberechnung
(Sichtbarkeit von Objekten von einem bestimmten Punkt im Raum aus in Optik) und
allgemein die Berechnung den weiteren Weg von Strahlen (Wellen) nach dem
Auftreffen auf Oberflächen. Strahlen repräsentieren dabei die Normalenvektoren zu einer Wellenfront. Das Ziel ist es, für
bestimmte Frequenzen den Energieanteil zu berechnen, der von einem Sender zu
einem Empfänger über die verschiedenen möglichen Wege durch die Szene
übertragen wird. Zur akustischen Simulation müssen die Materialeigenschaften
der verschiedenen Körper sowie die Dämpfung des Schalls durch die Luft
berücksichtigt werden. Nachteile sind:
- Langsamkeit,
da viele Strahlen nie den Empfänger erreichen und für präzise Statistiken
eine hohe Anzahl erforderlich ist.
- Die
Wellenlänge gegenüber den Abmessungen der Körper innerhalb einer Szene ist
nicht vernachlässigbar.
- Die
Beugung von Strahlen kann nicht berücksichtigt werden und zu Fehlern
kommen.
- http://www.youtube.com/watch?v=aBs0gKThcyM
Abbildung. Raytracing im Auto und in einem Raum.
[http://www.gearslutz.com/board/attachments/studio-building-acoustics/260680d1320071200-isd-gap-my-room-help-pls-chris-nicks-control-room-ray-trace.jpg]
10.10
Ordnungsanalyse
Die Ordnungsanalyse ist Analyse
des Geräusches und/oder der Schwingungen von rotierenden Maschinen. Der
Energiegehalt des Geräusches wird nicht über der Frequenz sondern über der
Ordnung aufgetragen. Das Spektrum wird auf Basis der aktuellen Drehzahl in ein
Ordnungsspektrum umgerechnet. Die Ordnung ist dabei ein Vielfaches der
Drehzahl. Die Ordnungsanalyse wird entweder bei einer festen, konstanten
Drehzahl durchgeführt oder für einen ganzen Hochlauf,
bei dem die Maschine von der niedrigsten bis zur höchsten Drehzahl beschleunigt
wird. Eine solche Analyse wird auch Signaturanalyse genannt.
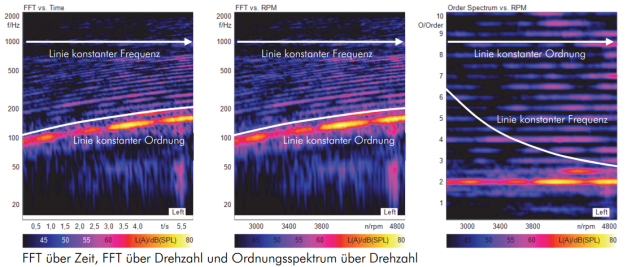
Abbildung.
Ordnungsanalyse.
[http://www.head-acoustics.de/downloads/de/application_notes/Ordnungsanalyse_d.pdf]
Bestimmte, je nach Drehwinkel
erzeugte Schallemissionen wiederholen sich nach jeder Umdrehung: periodischen
Schwingungen in ihrer Frequenz mit der Umdrehungsfrequenz des Motors (bzw.
deren Vielfachen) übereinstimmen. Frequenzen, die der Motordrehzahl oder deren
Vielfachen entsprechen, sind die Ordnungen. Die 1. Ordnung ist die Frequenz der
Motordrehzahl. Die 2. Ordnung ist 1.Ordnung * 2 usw.
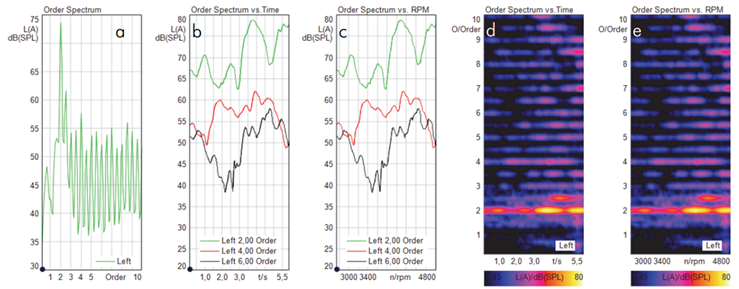
Abbildung.
Verschiedene Varianten der Ordnungsanalyse: Bei der Analyse wird der
Pegel(verlauf) dieser Ordnungen berechnet z.B. gemittelt (a), über der
Zeit (b und d), über der Drehzahl (c und e).
[http://www.head-acoustics.de/downloads/de/application_notes/Ordnungsanalyse_d.pdf]
10.11
Lineare und nicht lineare Analyse
Lineare Analyse hat die folgenden
wichtigsten Eigenschaften:
- Kleine
Störungen, Perturbationen
- Medium
ist linear
- Analyse
im Frequenzbereich
- Beispiele:
FEM, BEM, SEA
Nicht lineare Analyse hat die
folgenden wichtigsten Eigenschaften:
- Große
Störungen, Veränderungen
- Medium
ist nicht linear
- Analyse
im Zeitbereich (FFT, wenn periodisch)
- Beispiele:
MKS, CFD
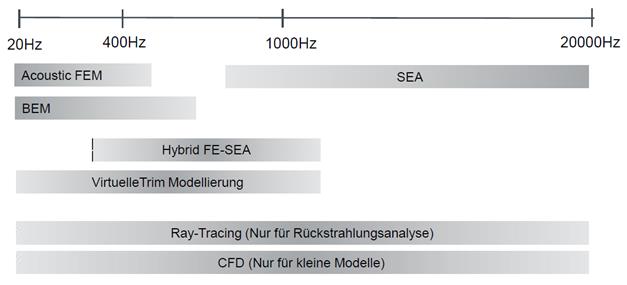
Abbildung.
Zusammenfassung von numerischen Methoden.
[AUDI]
*********************************************************************************************************************
11. Quellen
- P.
Zeller (Hsg): Handbuch Fahrzeugakustik:
Grundlagen, Auslegung, Berechnung, Versuch (ATZ/MTZ-Fachbuch) [Gebundene
Ausgabe], Verlag: Vieweg+Teubner Verlag;
Auflage: 2., überarb. Aufl. 2012 (16. Dezember
2011), Sprache: Deutsch, ISBN-10: 3834814431, ISBN-13: 978-3834814432
- LotharCremer, Michael Möser, ManfredHeckl, Wolfgang Kropp: Körperschall:
Physikalische Grundlagen und technische Anwendungen [Gebundene Ausgabe],
Gebundene Ausgabe: 580 Seiten, Verlag: Springer; Auflage: 3., aktualisierte
Aufl. 2010 (30. Oktober 2009), Sprache: Deutsch, ISBN-10: 3540403361,
ISBN-13: 978-3540403364
- Michael
Möser: Technische Akustik [Gebundene Ausgabe], Gebundene Ausgabe: 560
Seiten, Verlag: Springer; Auflage: 9., aktualisierte Aufl. 2012 (27.
September 2012), Sprache: Deutsch, ISBN-10: 3642309321, ISBN-13:
978-3642309328
- F. Alton Everest , Ken C.
Pohlmann: Master Handbook of Acoustics
[Englisch] [Taschenbuch], Taschenbuch: 528 Seiten, Verlag: Mcgraw-Hill Publ.Comp.;
Auflage: 5th edition. (1. Juli 2009), Sprache:
Englisch, ISBN-10: 0071603328, ISBN-13: 978-0071603324
- Jens
Blauert: Communication Acoustics
[Englisch] [Taschenbuch], Taschenbuch: 396 Seiten, Verlag: Springer Berlin
Heidelberg; Auflage: Softcover reprint of hardcover 1st ed. 2005 (27. April 2010), Sprache: Englisch, ISBN-10:
3642060609, ISBN-13: 978-3642060601
- Hermann
Henn: Ingenieurakustik: Physikalische Grundlagen und Anwendungsbeispiele
(German Edition) [Taschenbuch], Taschenbuch: 472 Seiten, Verlag: Vieweg+Teubner Verlag; Auflage: 4., überarb. u. erw. Aufl. 2008
(28. August 2008), Sprache: Deutsch, ISBN-10: 3834802557, ISBN-13:
978-3834802552
- Ian Stewart: Welt-Formeln, rororo Verlag, ISBN 978-3-499-63029-3
- Youtube
- Dan
Russell: http://www.acs.psu.edu/drussell/demos.html
- Wikipedia
- HeadAcoustics homepage
and tutorials
- Bang
and Olufsen homepage
- AudiTV
- Audi